



























科聡・具身紀②
スマートロボットの急速な発展を背景に、科聡は正式に具身智能産業への参入を発表し、ロボットの重要コア部品の研究開発に全面的に取り組む。
フットロボットコントローラーに続く第二の傑作として、科聡はJRDシリーズのロボット関節モジュールを発表した。その初代製品であるJRD2100-Tは、高い集積度と高性能な性能により、登場当初から多くのメーカーから広く認められている。
今後、科聡はさらに多くのボディーアイテム型スマートコア製品を展開し、業界に絶え間ない新たな活力を注ぎ続ける予定です。
高度集積・極致の精巧
JRD2100-Tは、減速機、モーターおよびモータ駆動装置を一体型で高度に統合した設計を採用しており、各モジュールの構造がコンパクトで、取り付けや分解が容易です。これにより、機械全体の組立効率とシステムの信頼性が大幅に向上します。

さらに特筆すべきは、このモジュールが肘、腕、肩などの重要な関節動作に特化して設計されており、モジュール式の構成によりロボットの動力システムがより柔軟かつ多様に応答可能になり、豊かな動作表現を実現できる点です。

スマートコントロール・精密な連携
デュアルエンコーダー閉ループ制御システムにより、速度回路、トルク回路、位置回路およびMIT混合制御を実現し、あらゆる動作が「心のままに動く」ことを保証します。
また、CANFD高速通信プロトコルをサポートし、複数モジュール間のリアルタイム連携を実現することで、効率的かつストレスなく動作します。
多重の安全保護機構には、過電流、過電圧、低電圧、超速、過熱などの監視機能が含まれており、各種極限条件下でも装置が安定して動作することを保証します。

技術のハイライト・一目でわかる
01.中空配線設計:配線がより柔軟で、構造もより美しくなります。
02.集中式巻線プロセス:槽満率とトルク密度を向上させ、さらなる動力性能の解放
03.クラシックスコア槽と最適極槽を組み合わせた設計:歯車のトルク幅値と変動を効果的に低減し、スムーズな運転を実現します。
04.惑星減速機駆動:高負荷、長寿命、精密で安定
05.高集積FOC駆動ソリューション:高効率で省エネ、迅速な対応
06.高精度多回転絶対値エンコーダ:ミリメートルレベルの位置精度
07.コンパクトで軽量:人形ロボットや協働ロボットにより適しています
08.低騒音、低振動で運転:複雑で静かな環境にも対応

パラメータ情報
| 減速比 | 36 | 定格電圧 | 48 V |
| 定格相電流 | 3.8 A | 定格電力 | 135 W |
| 定格回転数 | 77 RPM | 定格トルク | 12 Nm |
| ピーク回転数 | 87 RPM | ピーク相電流 | 12 A |
| ピークトルク | 36 Nm | モーターの平均効率 | 72% |
| トルク定数 | 2.8 Nm/A | 減速機のバックラッシュ | 8 Arcmin |
| 通信方法 | CAN FD | 通信波特率 | 500K-5M |
| エンコーダ | 双编21位 | - | - |

未来が期待される・今すぐ行動しよう
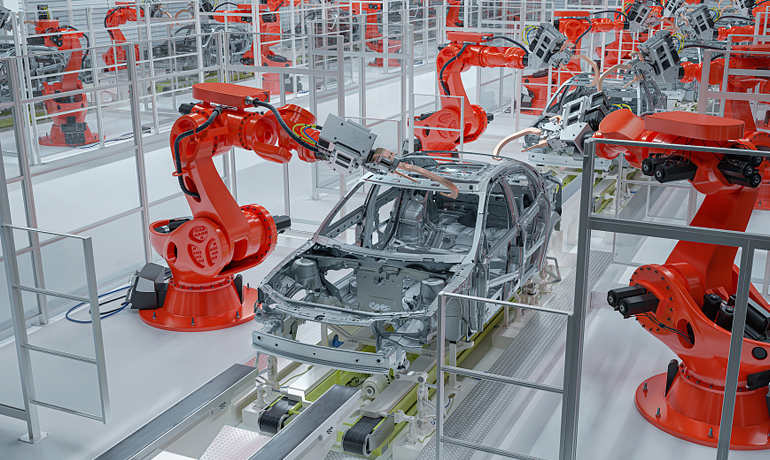
JRDシリーズは、さらに多くの関節タイプをカバーする製品ラインナップを拡大し、医療リハビリテーション、産業協働、教育サービスなど、さまざまなシーンにおける次世代のアシスト型スマートロボットの包括的な導入をサポートしていく。