


































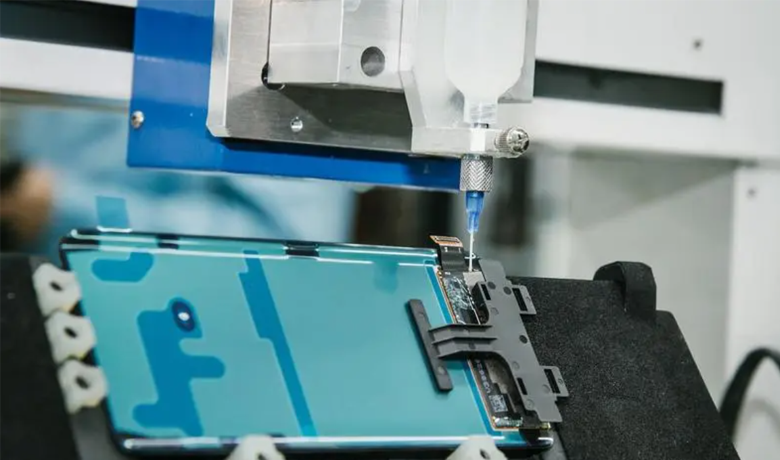







シナリオの概要
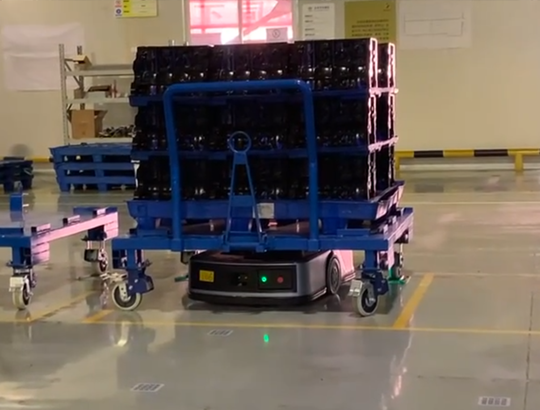
フォークリフト移動ロボットは、高さの異なるパレット積みされた荷物の積み込み、積み下ろし、段積み、搬送などの自動作業に適しており、専用車両を追加することなく、パレット積みされた荷物の入港に必要な一連の吊り上げ、積み込み、搬送を完了できます。工場作業場における物流の無人化・無人化を実現します。
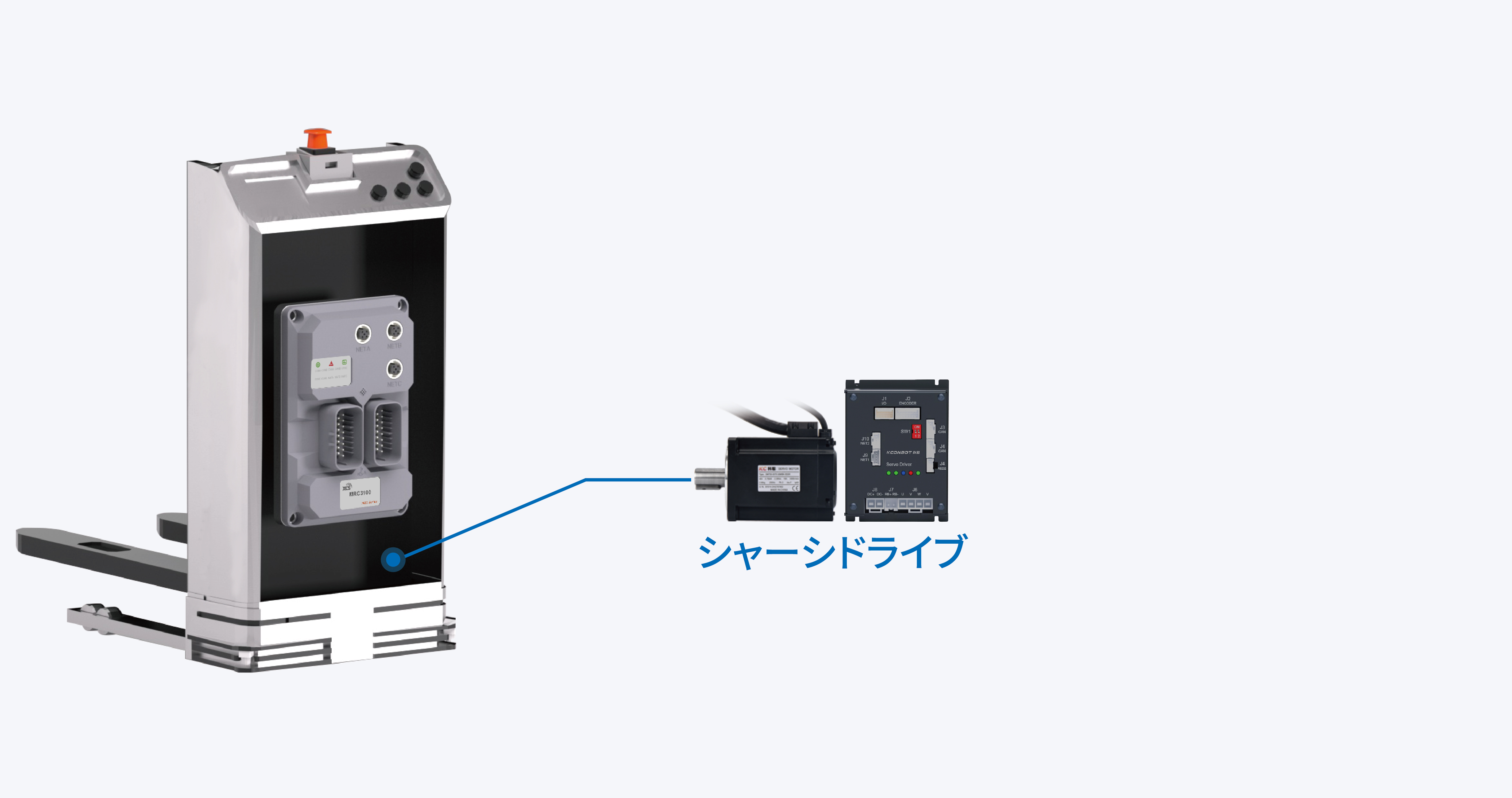
フォークリフト移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、オプションの9つのカテゴリに主に分類されます。機能、ユニットモジュール構成が大きい。
フォークリフト移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、オプションの9つのカテゴリに主に分類されます。機能、ユニットモジュール構成が大きい。
スキーム構成


ユニバーサルコントローラ

フォーク型コントローラー


2Dレーザー距離計
3Dレーザーセンサー

磁気ナビゲーションセンサー

磁気ナビゲーションセンサー

RFIDセンサー
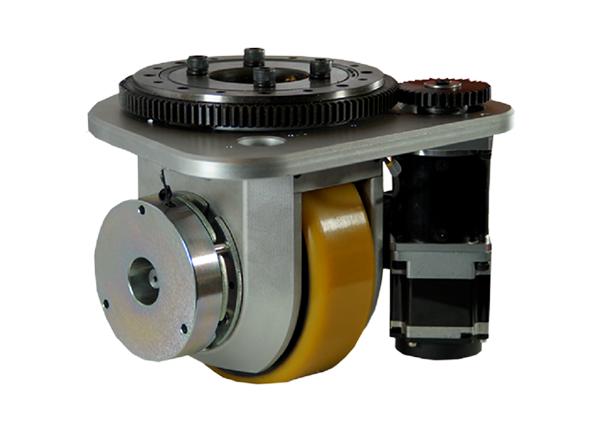
駆動輪

サーボモーター

サーボモーター

サーバードライバー

サーバードライバー

サーバードライバー

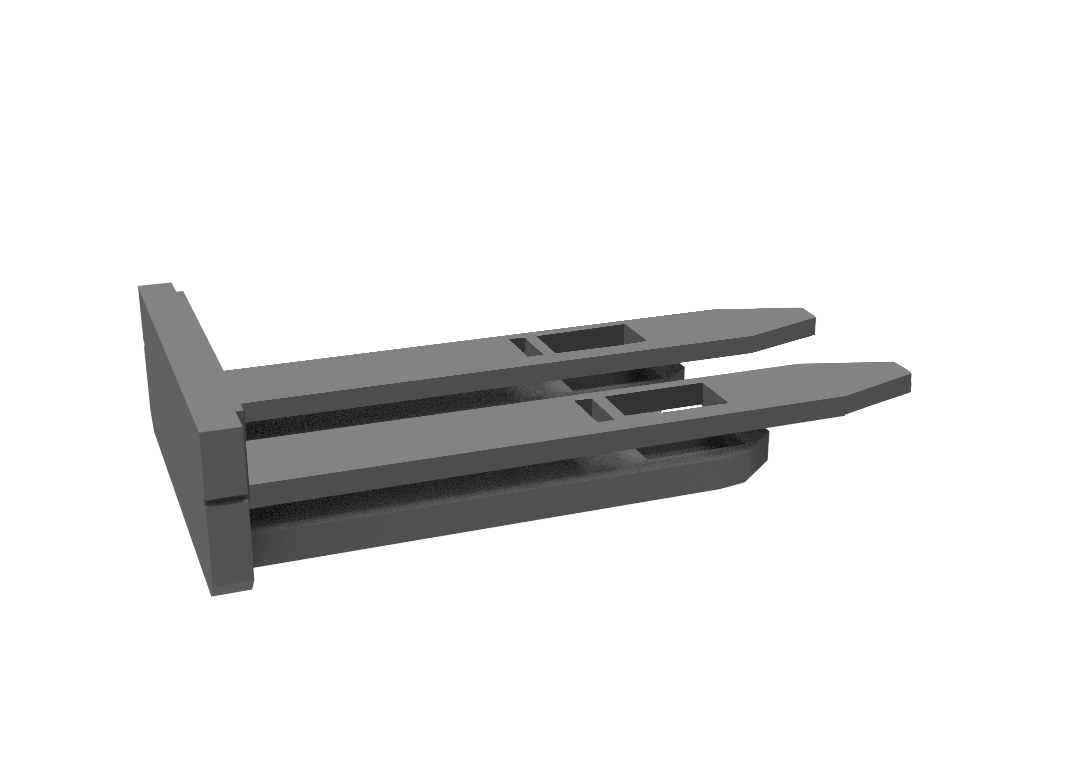
フォーク

エンコーダアダプタモジュール

プルコードエンコーダー

アブソリュートエンコーダ

プルコードエンコーダー

障害物回避用レーザーセンサー

障害物回避用レーザーセンサー

デュアルレンズカメラ


ワイヤードハンドオペレーター

ポケベルモジュール

車載ディスプレイ

ハンディターミナル


ワイヤレスクライアント


ビジョンモジュール

ビジョンセンサー

深度カメラ
関連事例

フォークリフト移動ロボット
ナビゲーション:レーザーナビゲーション
シャシーモード:シングルラダーホイール
ナビゲーション精度: ±5mm
シャシーモード:シングルラダーホイール
ナビゲーション精度: ±5mm

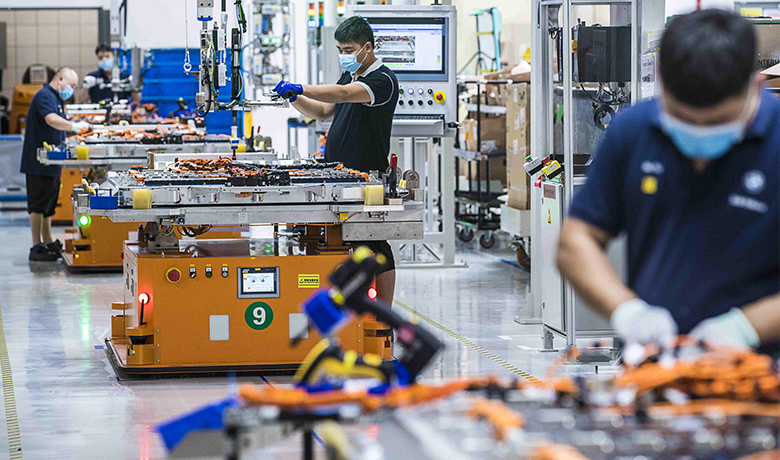
前進式移動ロボット
ナビゲーション:レーザーナビゲーション
シャシーモード:シングルラダーホイール
ナビゲーション精度: ±5mm
シャシーモード:シングルラダーホイール
ナビゲーション精度: ±5mm

SLIM
ナビゲーションモード:レーザーナビゲーション
シャーシモード:シングルラダーホイール
ナビゲーション精度: ±5mm
シャーシモード:シングルラダーホイール
ナビゲーション精度: ±5mm
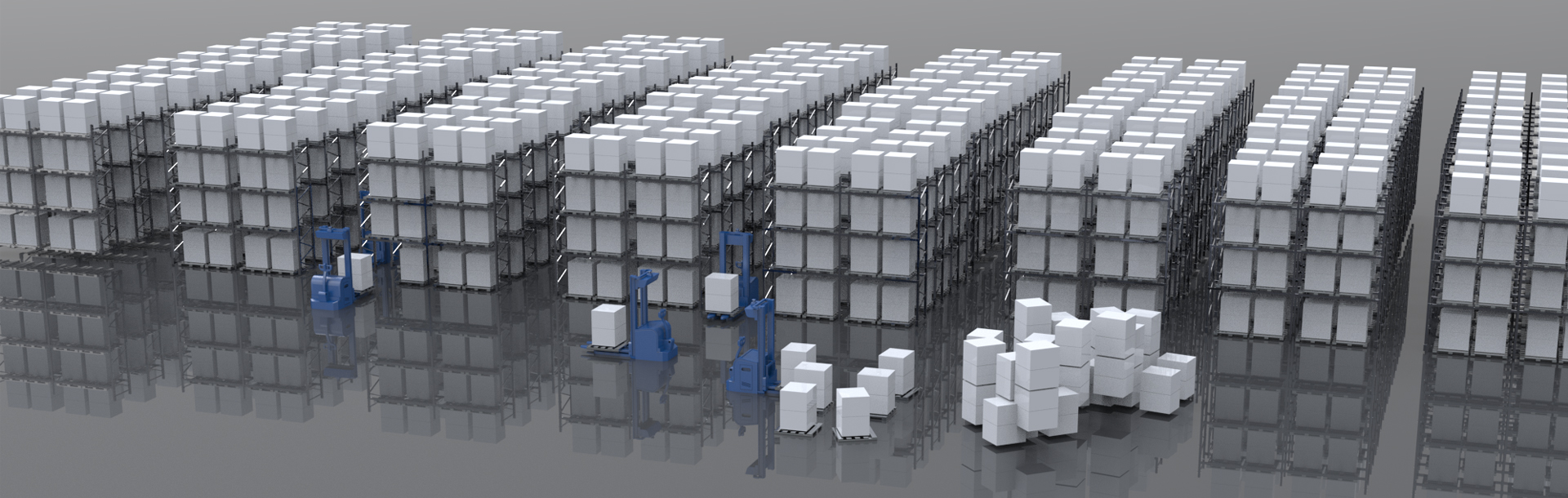
関連適用シーン

© 2023 Zhejiang Kecong Control Technology Co., Ltd. 公式ウェブサイト | 移動ロボットに人間のサービスを提供しましょう 浙江省公共ネットワークセキュリティ番号 33052302000842 浙ICP备19001570号-1 sitemap.xml