




































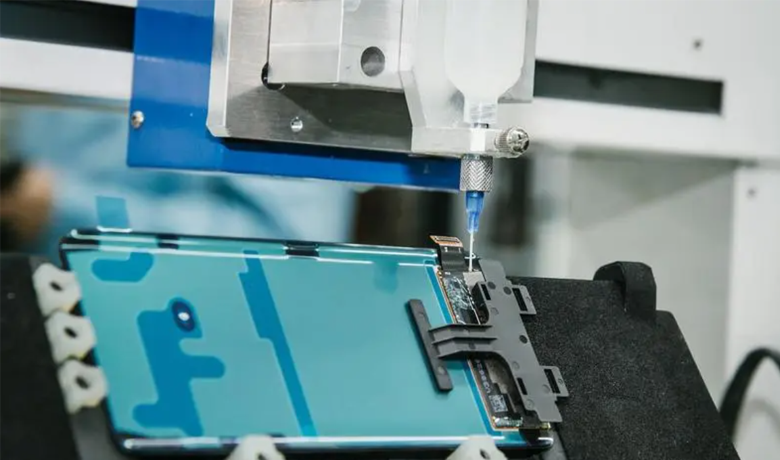







シナリオの概要
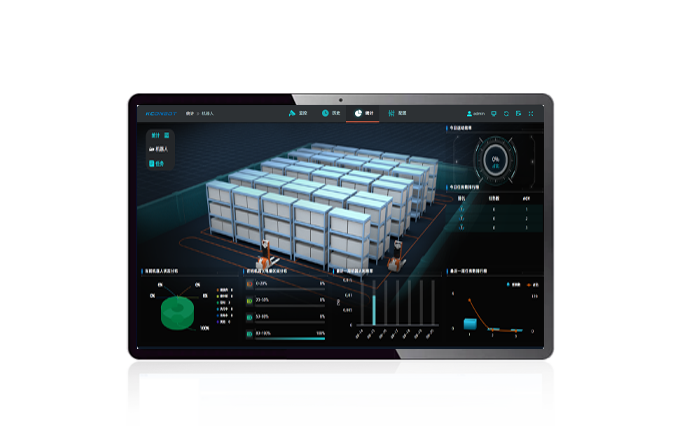
重量移動ロボットはバッテリーまたは内燃エンジンを動力とし、高出力モーター、減速機、ユニバーサル駆動輪を備え、柔軟な操作を実現し、車速調整、揚力補償、車両ブレーキなどの万能機能を備えています。ステアリング、自由経路計画、自動誘導、オンライン急速充電、複数車両グループ化連携などの機能を備え、インテリジェント車両を集中配車および管理できます。
大型移動ロボットの全体的なソリューションは、主に、車両の機能に応じて、制御システム、ナビゲーションセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、およびオプションの追加機能などのユニットモジュールに分かれています。移動ロボット。
大型移動ロボットの全体的なソリューションは、主に、車両の機能に応じて、制御システム、ナビゲーションセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、およびオプションの追加機能などのユニットモジュールに分かれています。移動ロボット。
スキーム構成


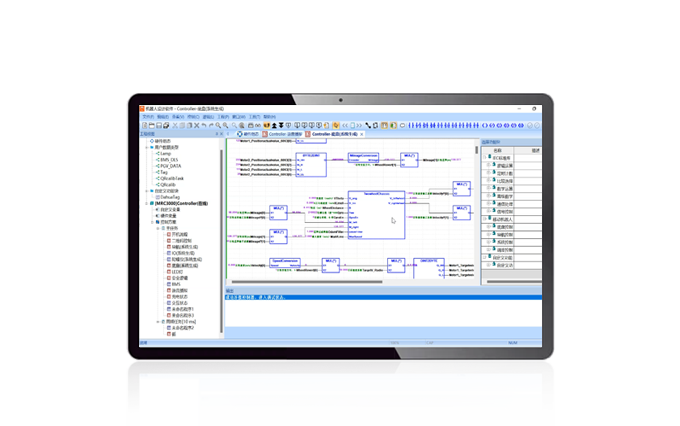
ユニバーサルコントローラ
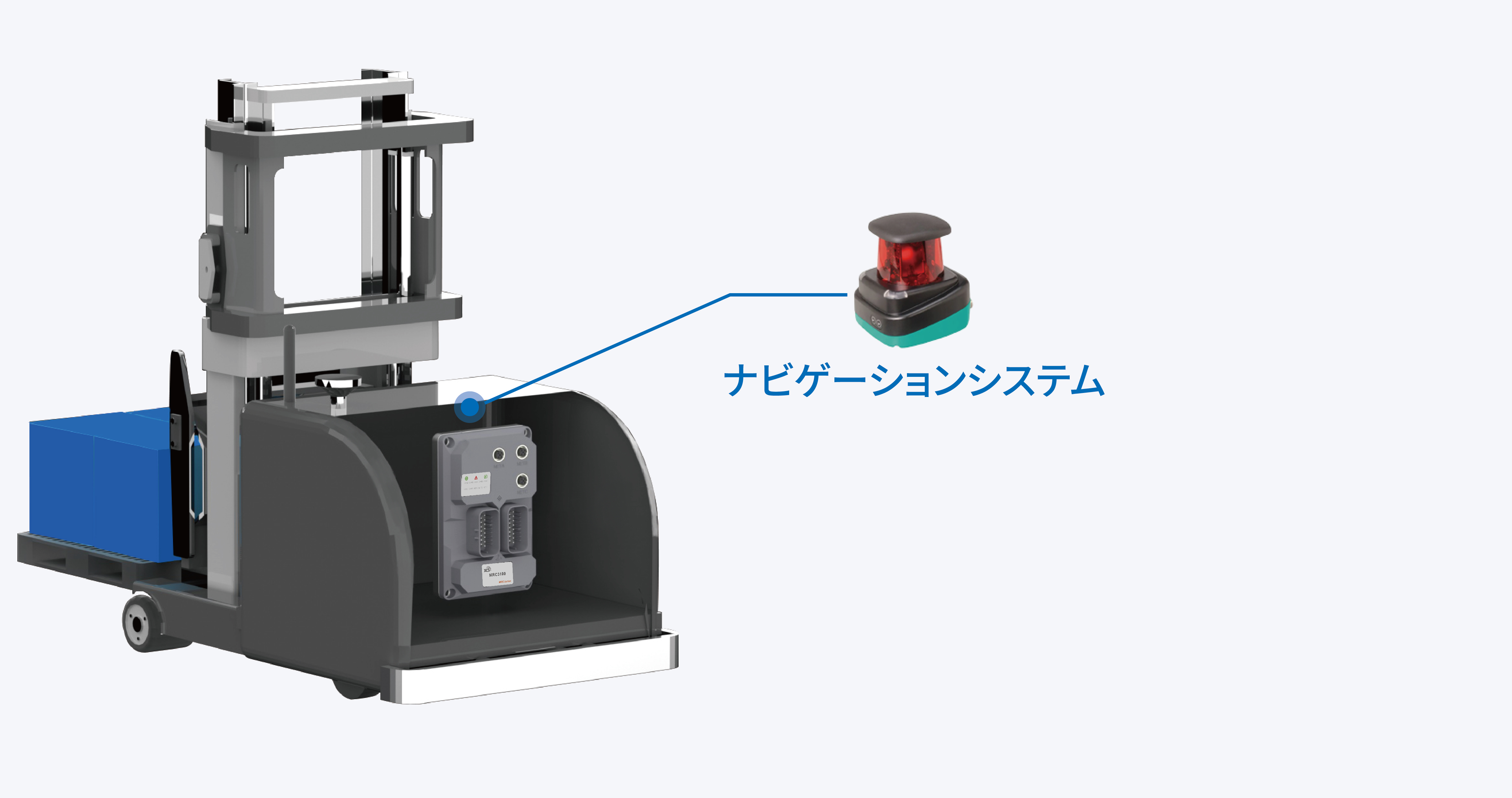

レーザーセンサー

磁気ナビゲーションセンサー

磁気ナビゲーションセンサー

RFIDセンサー

GNSSセット

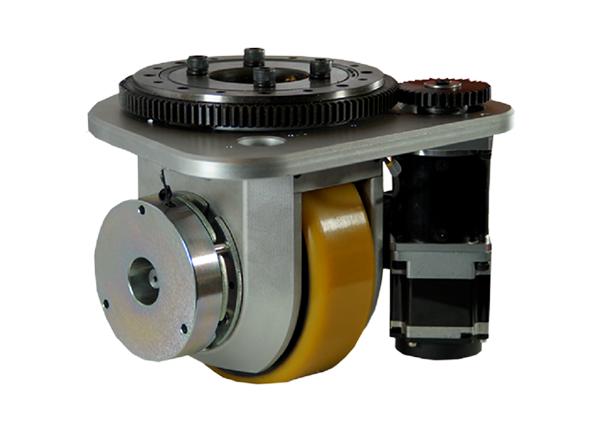
駆動輪

ドライバ

モーター

モーター


障害物回避用レーザー

障害物回避用レーザー

障害物回避用レーザー


ハンドオペレーター

ポケベルモジュール

車載ディスプレイ

スイッチ

照明


ワイヤレスクライアント
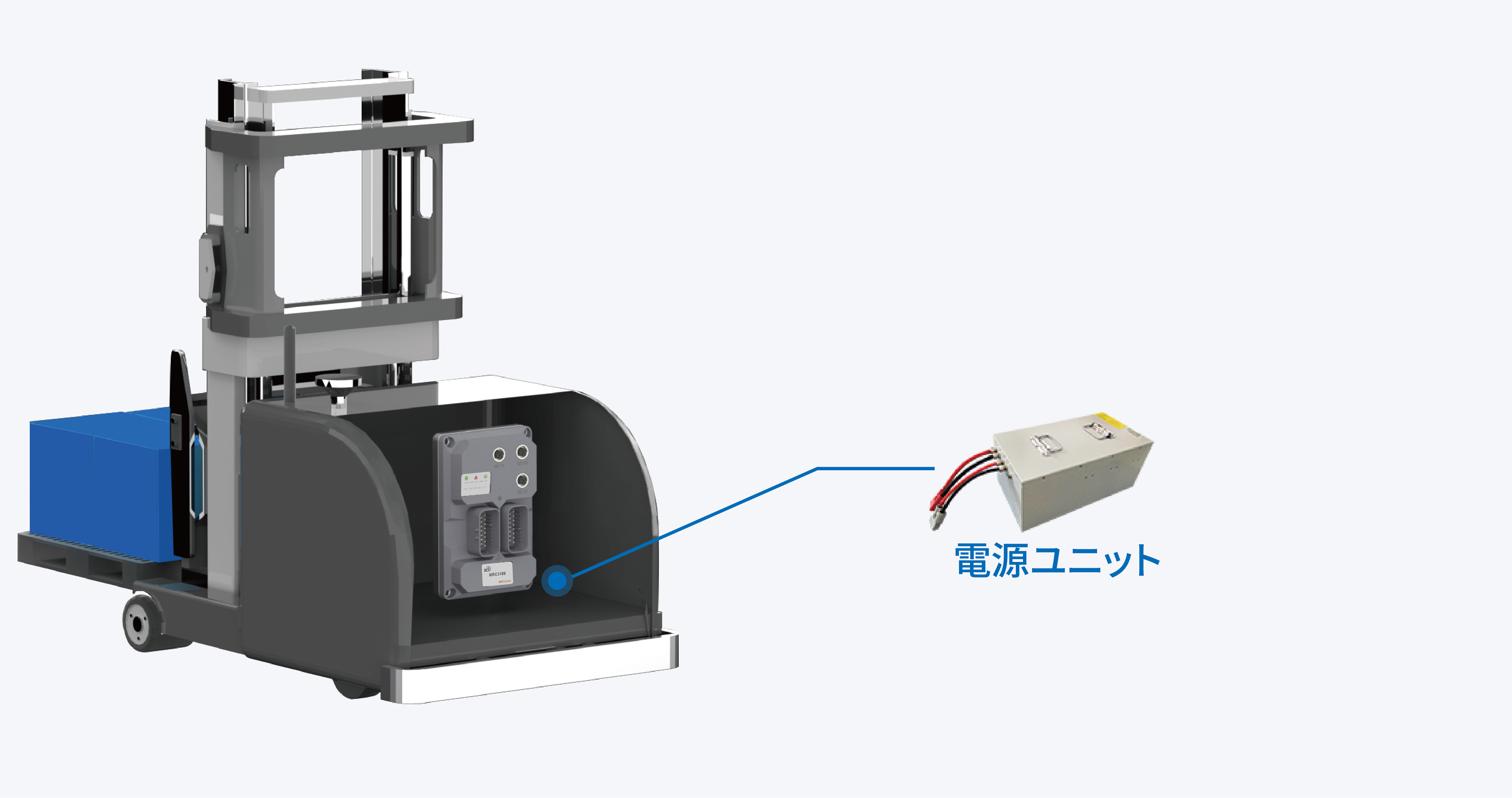
電池

電池
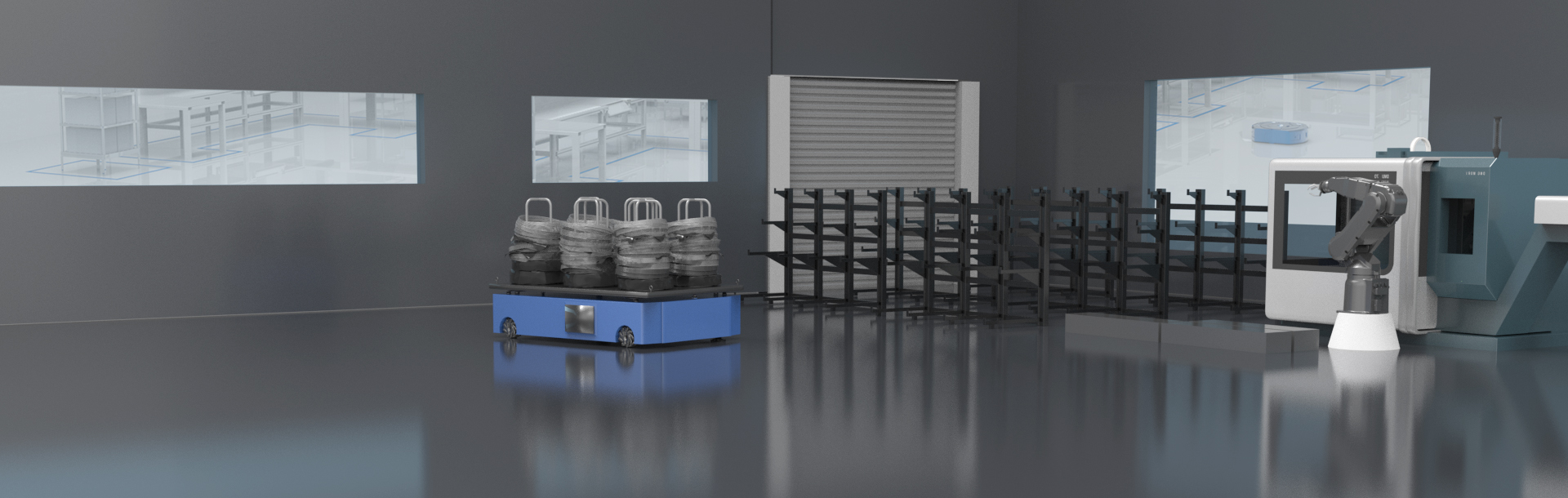
関連事例

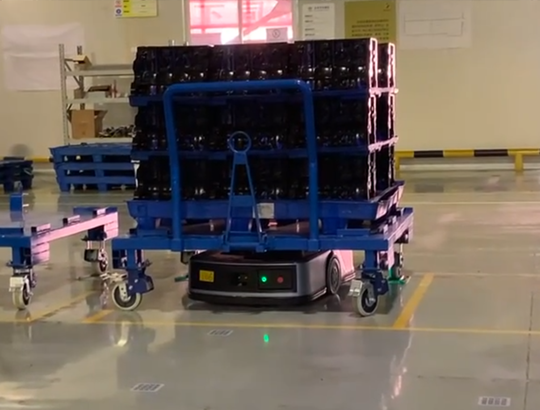
重量型移動ロボット
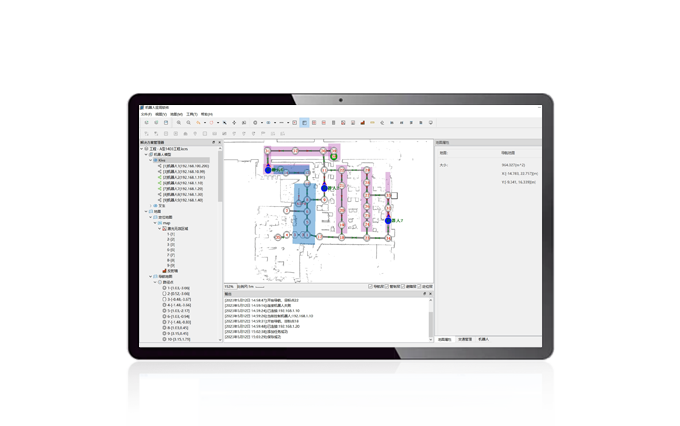
ナビゲーション:レーザー+GNSSナビゲーション
シャーシ: 6つの操舵輪
ナビゲーション精度: ±10mm
シャーシ: 6つの操舵輪
ナビゲーション精度: ±10mm

© 2023 Zhejiang Kecong Control Technology Co., Ltd. 公式ウェブサイト | 移動ロボットに人間のサービスを提供しましょう 浙江省公共ネットワークセキュリティ番号 33052302000842 浙ICP备19001570号-1 sitemap.xml