





























































型号 | MRC3100-L101 | MRC3100-L104 | MRC3100-H101 | MRC3100-H104 |
説明 | 差動輪専用コントローラ | 差動輪専用コントローラ | 差動輪専用コントローラ | 差動輪専用コントローラ |
寸法 W x H x D(mm) | 150.5×100.5×40 | 150.5×100.5×40 | 150.5×100.5×40 | 150.5×100.5×40 |
保護等級 | IP65 | IP65 | IP65 | IP65 |
温度範囲 | -25℃~+70℃ | -25℃~+70℃ | -25℃~+70℃ | -25℃~+70℃ |
湿度範囲 | 10%~90%RH 結露なし | 10%~90%RH 結露なし | 10%~90%RH 結露なし | 10%~90%RH 結露なし |
EMC | 工業グレード3 | 工業グレード3 | 工業グレード3 | 工業グレード3 |
IMU | √ | √ | √ | √ |
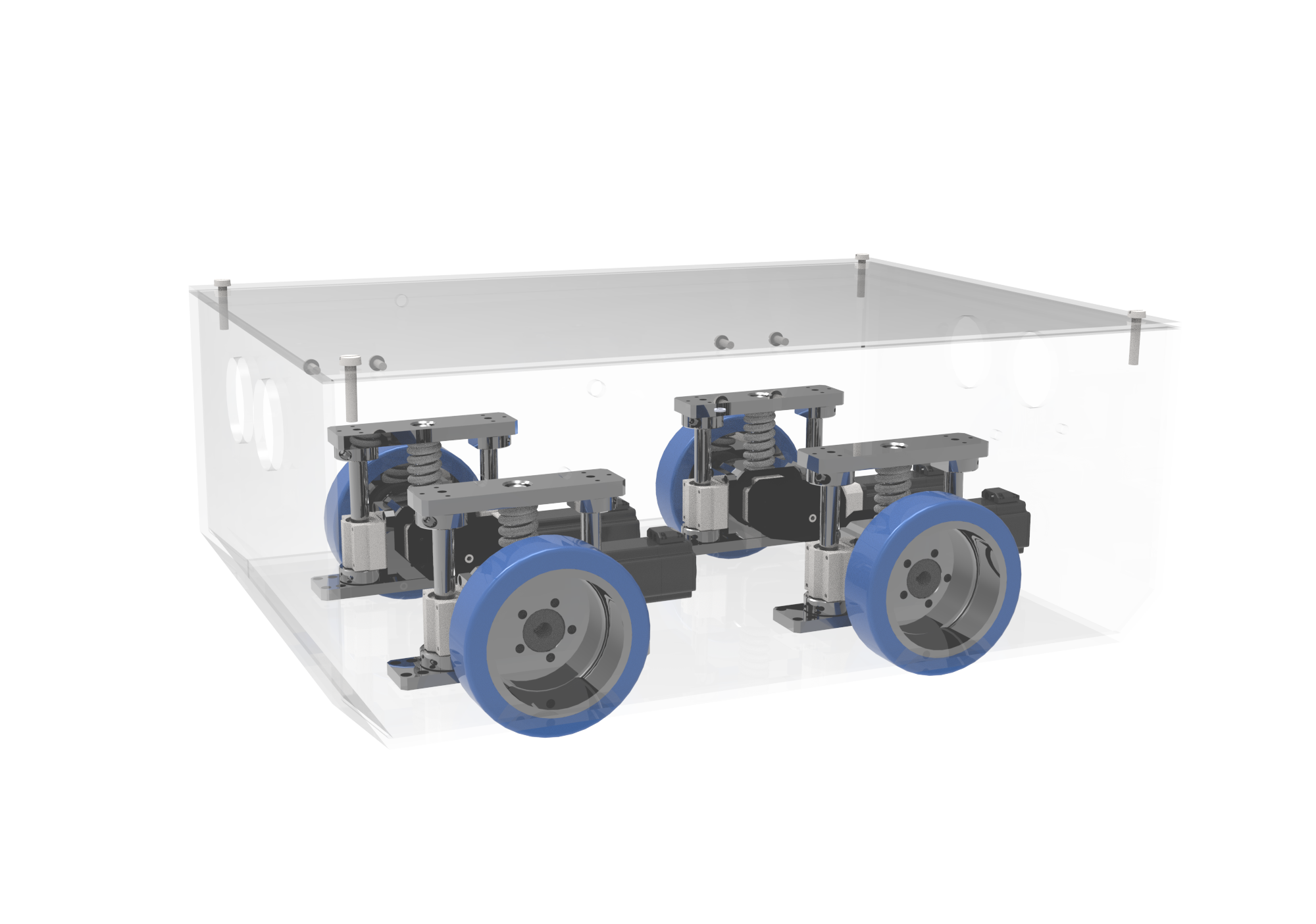
差動シャーシ運動モデル | 2輪差動、4輪差動 | 2輪差動、4輪差動 | 2輪差動、4輪差動 | 2輪差動、4輪差動 |
ステアリングホイールシャーシ運動モデル | × | × | × | × |
その他のシャーシ運動モデル | × | メカナムホイール | × | メカナムホイール |
レーザー誘導 | √ | √ | √ | √ |
QRコード誘導 | √ | √ | × | × |
磁気誘導 | × | × | × | × |
その他の誘導方式 | ハイブリッド誘導 | ハイブリッド誘導 | GNSS誘導、ハイブリッド誘導 | GNSS誘導、ハイブリッド誘導 |
誘導・測位精度 | 自然特徴SLAMレーザー誘導 ±10mm、反射板レーザー誘導 ±5mm、QRコード誘導 ±10mm | 自然特徴SLAMレーザー誘導 ±10mm、反射板レーザー誘導 ±5mm、QRコード誘導 ±10mm | 3Dレーザー誘導 ±10mm、GNSS誘導 ±50mm、GNSS+3Dレーザー ハイブリッド誘導 ±25mm | 3Dレーザー誘導 ±10mm、GNSS誘導 ±50mm、GNSS+3Dレーザー ハイブリッド誘導 ±25mm |
角度制御精度 | ±0.5° | ±0.5° | ±1° | ±1° |
マップ面積 | ≤400000㎡ | ≤400000㎡ | ≤400000㎡ | ≤400000㎡ |
CAN(チャネル) | 3 | 3 | 3 | 3 |
RS485/RS232/RS422(チャネル) | 3/×/2 | 3/×/2 | 3/×/× | 3/1/× |
マルチ通信ポート(チャネル) | 1(可配CAN/RS485/RS232) | 1(可配CAN/RS485/RS232) | 1(可配CAN/RS485/RS232) | 1(可配CAN/RS485/RS232) |
PWMチャネル | × | × | × | × |
AI/AO | × | × | × | × |
DI/DO/DIO | 14/8/4 | 14/8/4 | 14/8/4 | 14/8/4 |
エンコーダー(チャネル) | 2 | 2 | 2 | 2 |
オーディオインターフェース | 1 | 1 | 1 | 1 |
有線産業用イーサネット | 3 | 3 | 3 | 3 |
無線デバッグインターフェース | √ | √ | √ | √ |
ロボット設計ソフト | √ | √ | √ | √ |
ロボットアプリケーションソフト | √ | √ | √ | √ |
ロボット監視・スケジューリングソフト | オプション | オプション | オプション | オプション |
拡張機能 | パレット脚認識、フォローモード、ランドマーク二次測位、ナビレーザー補助障害物回避、3Dビジョン障害物回避 | パレット脚認識、フォローモード、ランドマーク二次測位、ナビレーザー補助障害物回避、3Dビジョン障害物回避 | パレット脚認識、フォローモード、ランドマーク二次測位、ナビレーザー補助障害物回避、3Dビジョン障害物回避 | パレット脚認識、フォローモード、ランドマーク二次測位、ナビレーザー補助障害物回避、3Dビジョン障害物回避 |


潜在的なリフティングとハンドリングの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーション センサー、シャーシ ドライブ、アクチュエーター、安全検出、インタラクティブ モジュール、通信モジュール、電源ユニット、オプションの 9 つのカテゴリに主に分類されます。機能、ユニットモジュール構成が大きい。

協調型(複合型)移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、主に制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能に分けられます。 9つの主要なユニットモジュールで構成されています。

コンベア型移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、主に制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、オプション機能に分かれます。大規模なユニットモジュール構成。。

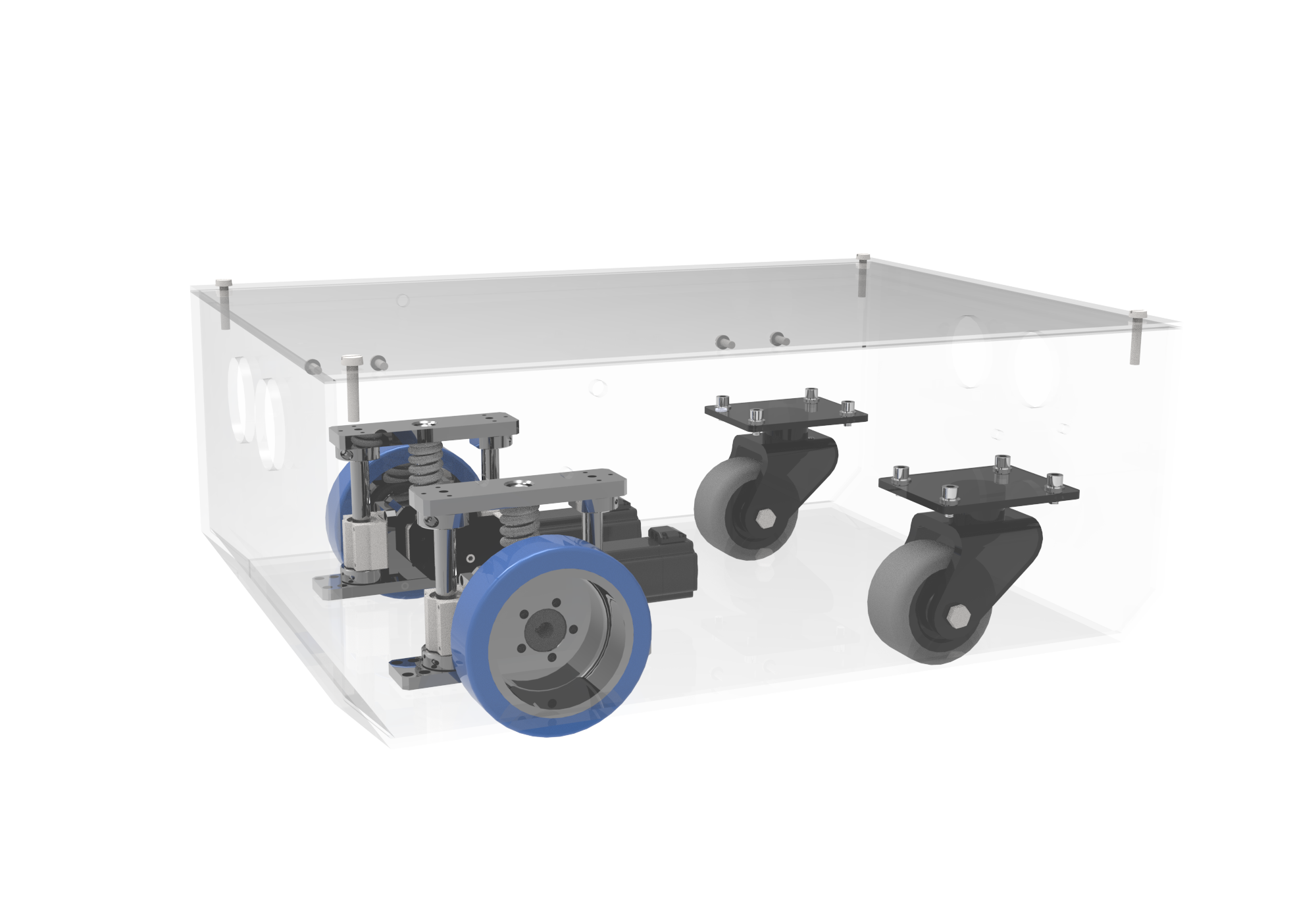
ボックス型移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、豊富なユニットモジュール構成とオプション機能を搭載。
