












































シナリオの概要
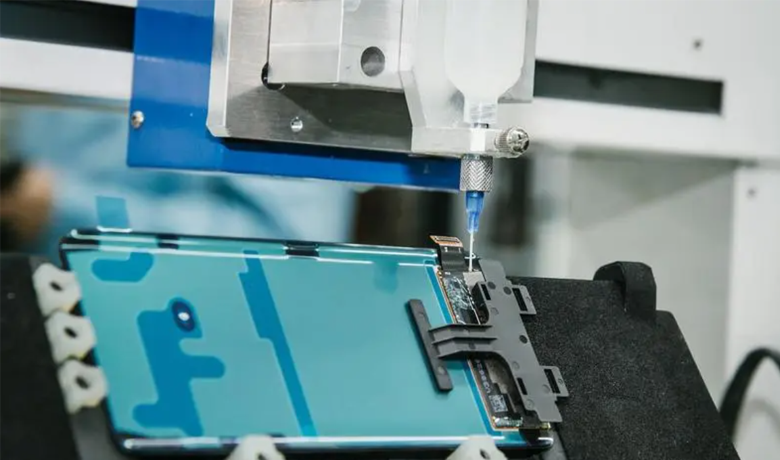
駐車ロボットは、利用者が駐車プラットフォームに乗り入れた自動車を自動的かつ正確に駐車スペースまで運び、自動車をピックアップする際には、利用者のピックアップスペースまで自動車を自動的に運ぶ。 駐車ロボットは駐車スペースを節約するだけでなく、車両のアクセス時間を短縮し、快適で便利な駐車サービスを提供する。
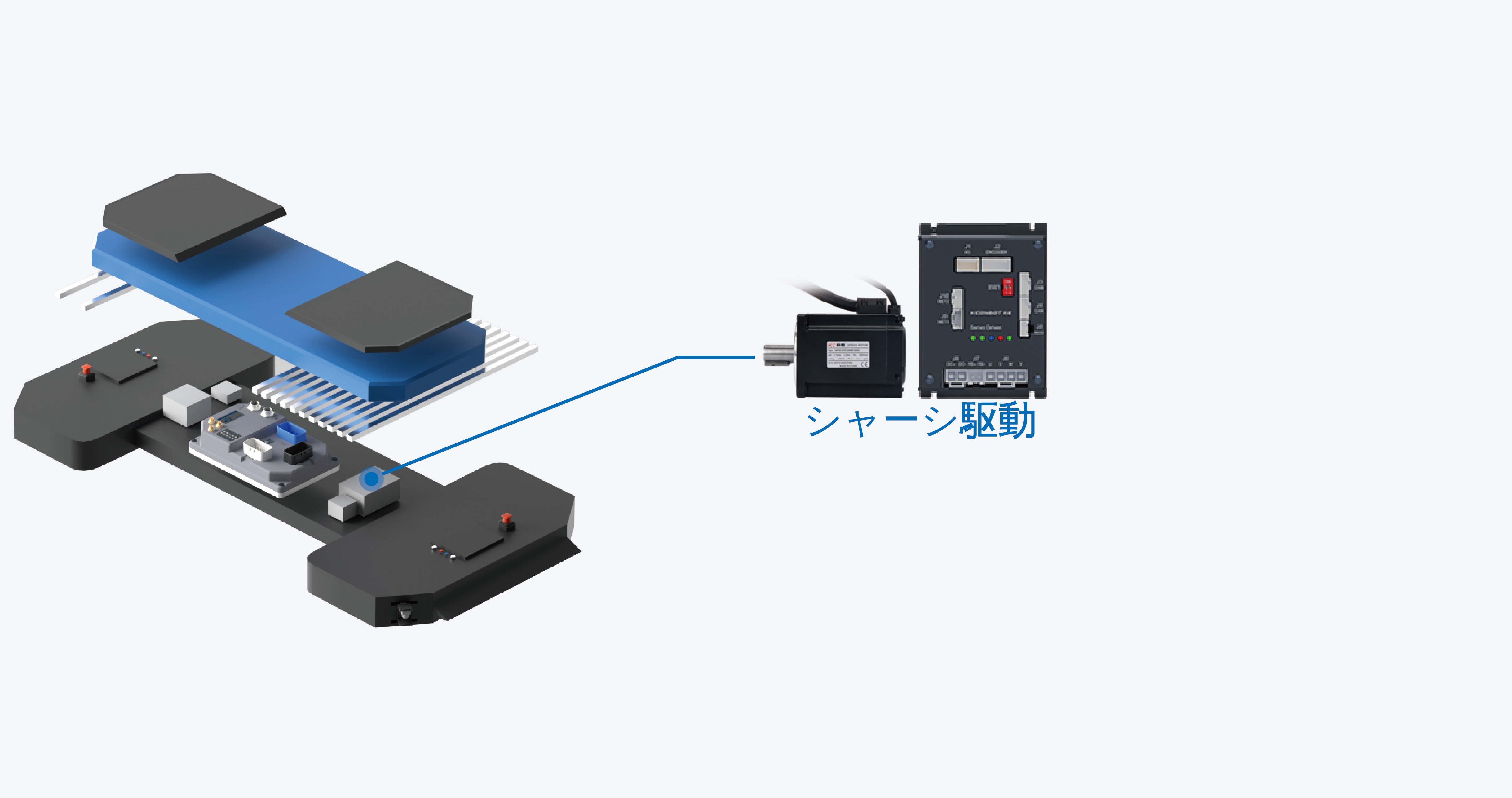
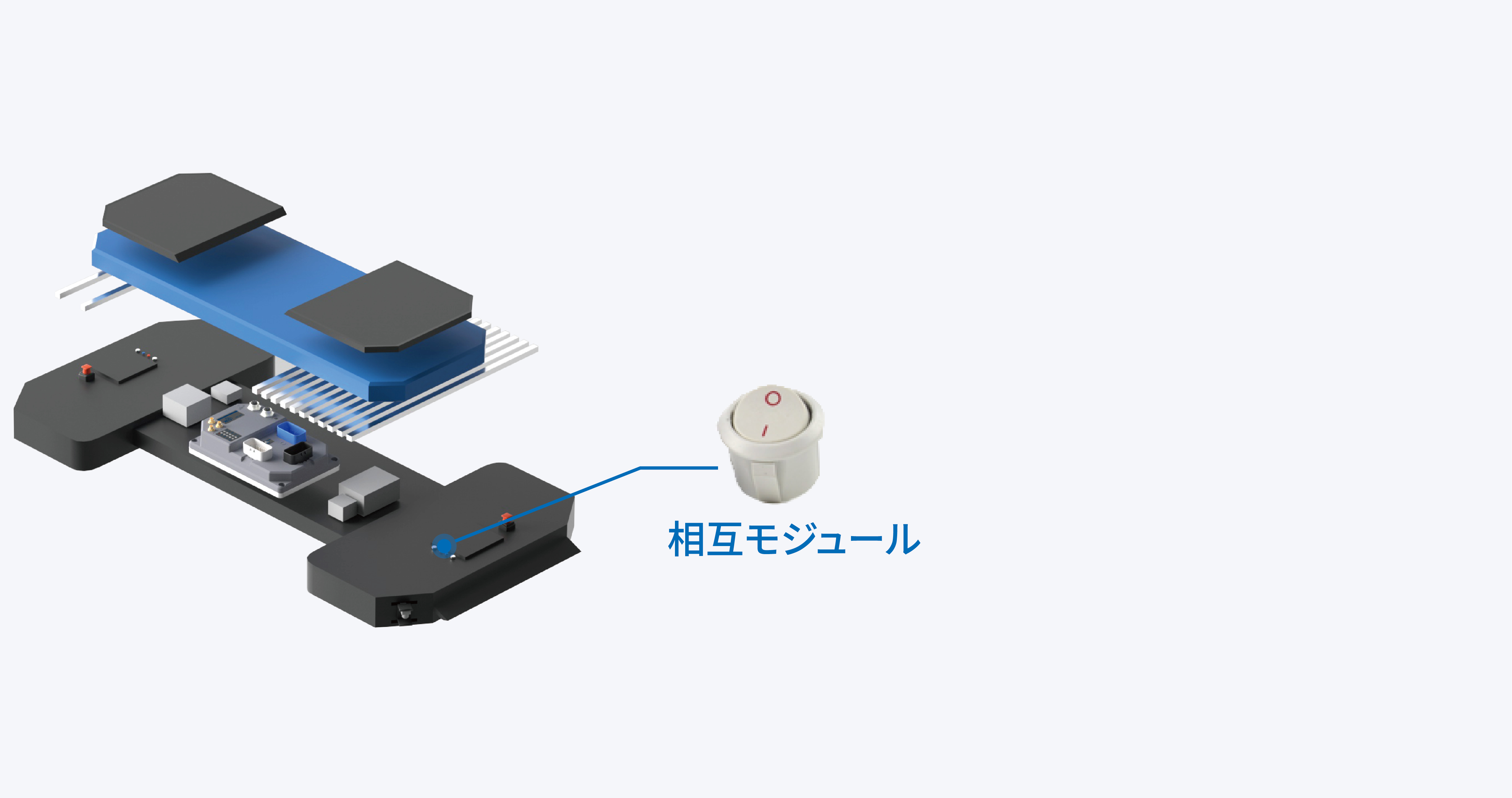
駐車移動ロボットの全体的なソリューションは、主に移動ロボットの車両全体の機能に応じて、制御システム、ナビゲーションと感知、シャーシ駆動、安全検出、相互作用モジュール、通信モジュール、電源ユニット、およびオプション機能から構成されるユニットモジュールに分かれています。
駐車移動ロボットの全体的なソリューションは、主に移動ロボットの車両全体の機能に応じて、制御システム、ナビゲーションと感知、シャーシ駆動、安全検出、相互作用モジュール、通信モジュール、電源ユニット、およびオプション機能から構成されるユニットモジュールに分かれています。
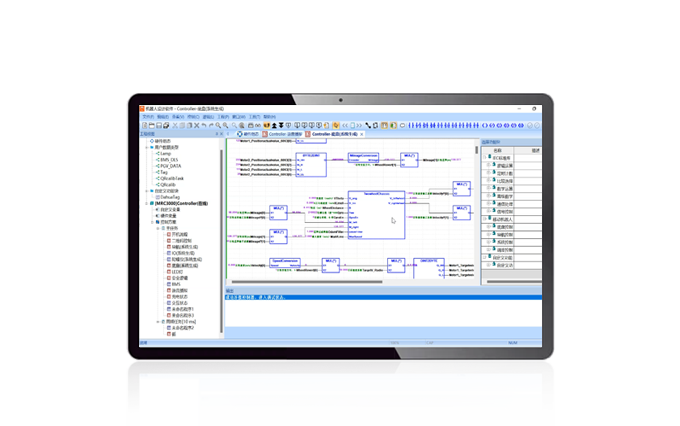
スキーム構成


ユニバーサルコントローラ
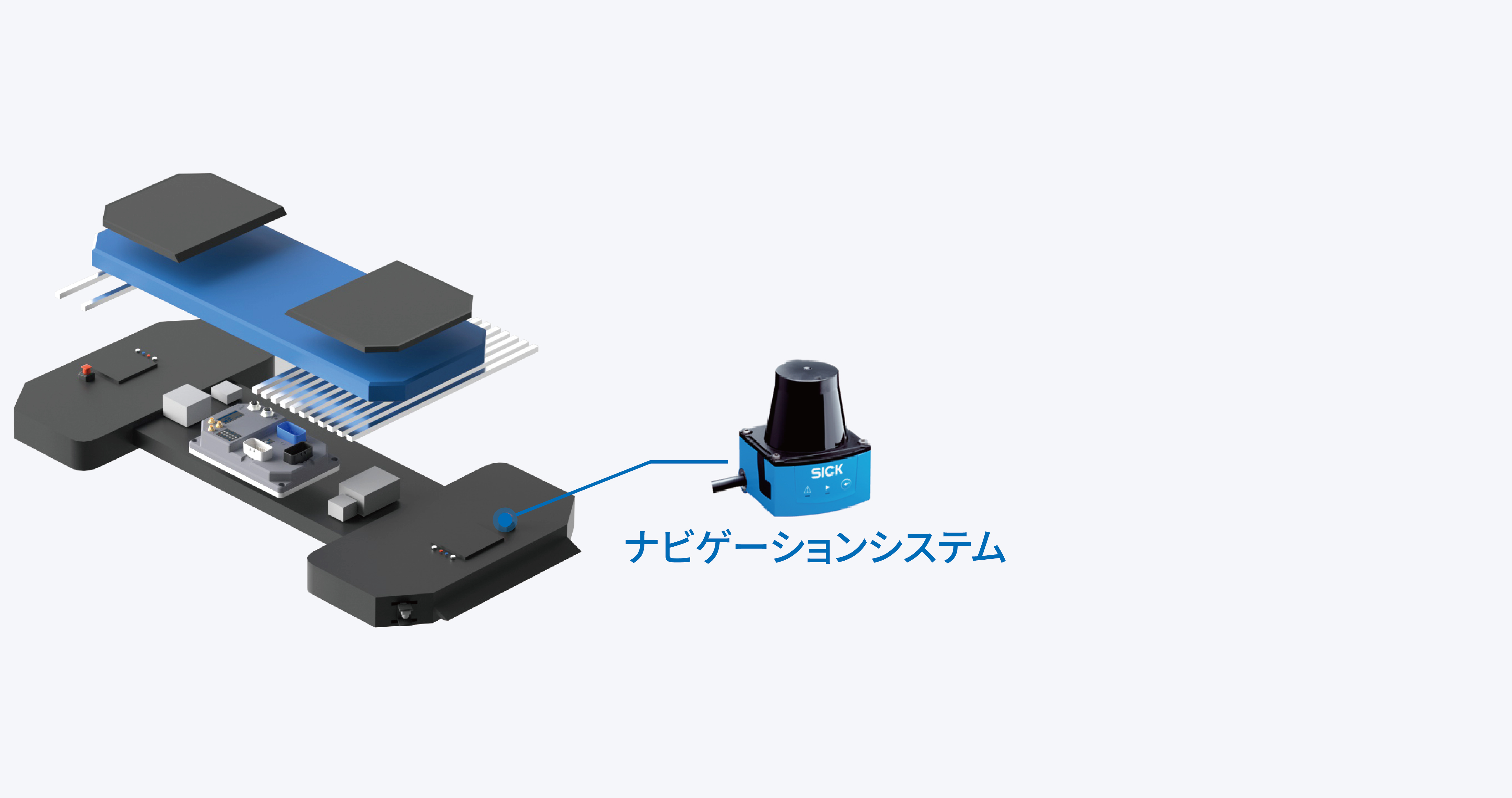

レーザーセンサー
レーザーセンサー
レーザーセンサー

マクナミーホイール

ドライバ

ドライバ

ドライバ


障害物回避用レーザー

障害物回避用レーザー

障害物回避用レーザー

ハンドオペレーター

ポケベルモジュール

車載ディスプレイ

照明

スイッチ


ワイヤレスクライアント
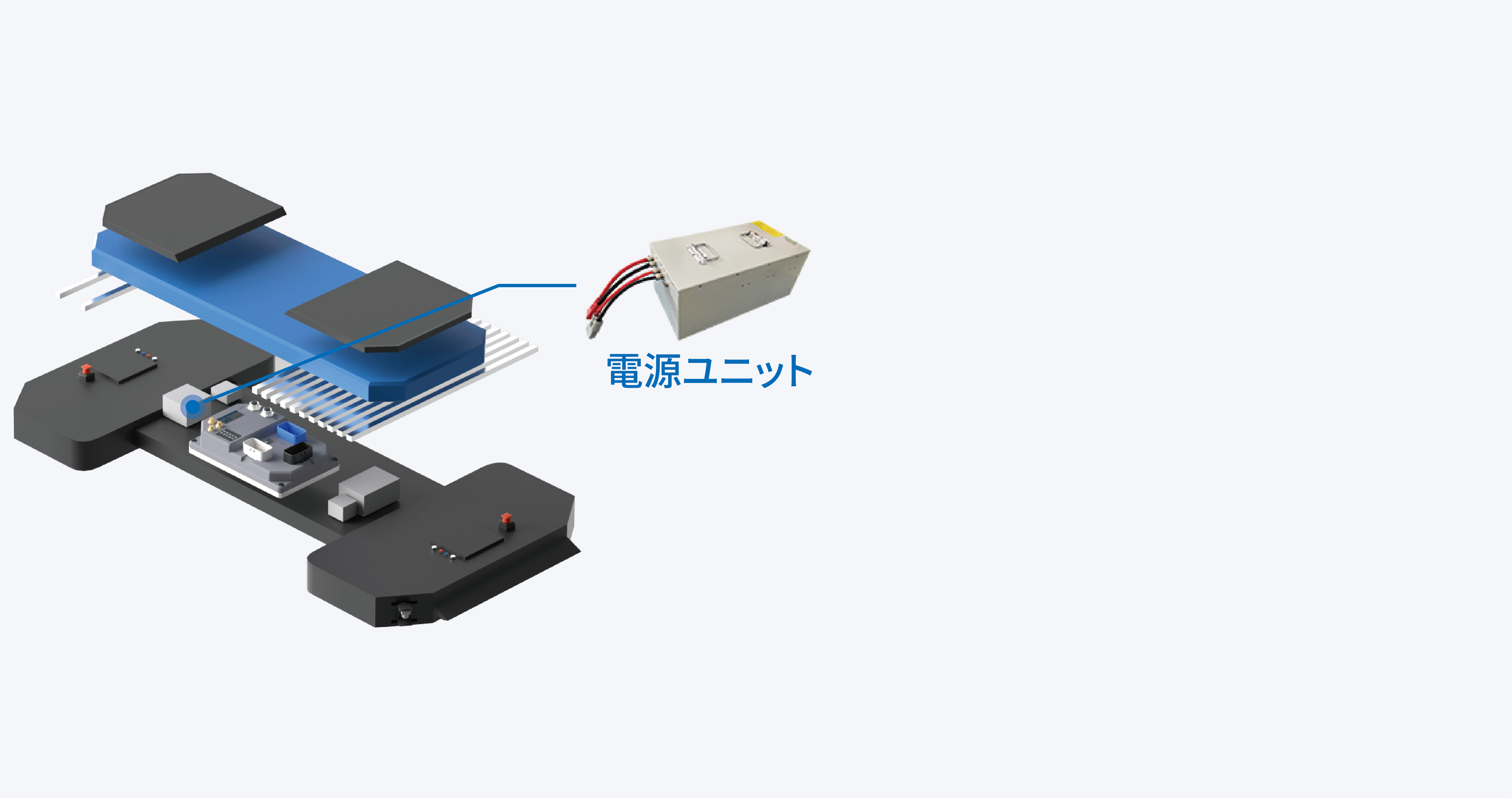
電池

電池
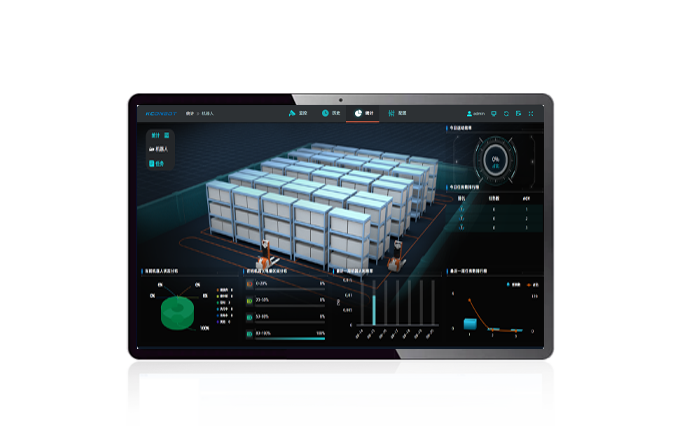
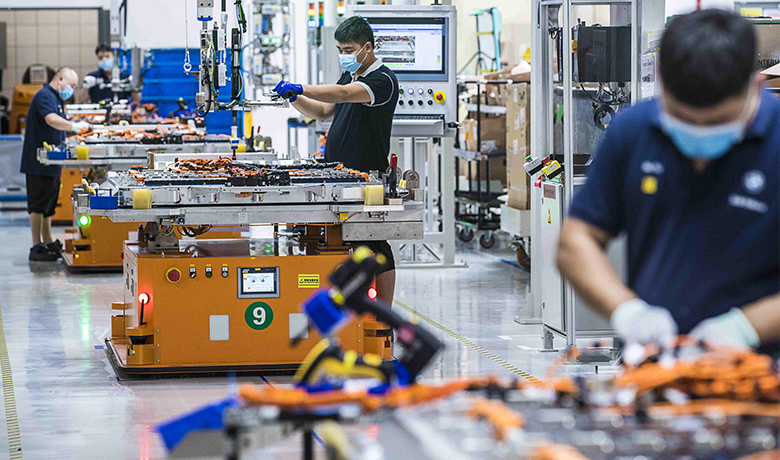
関連事例

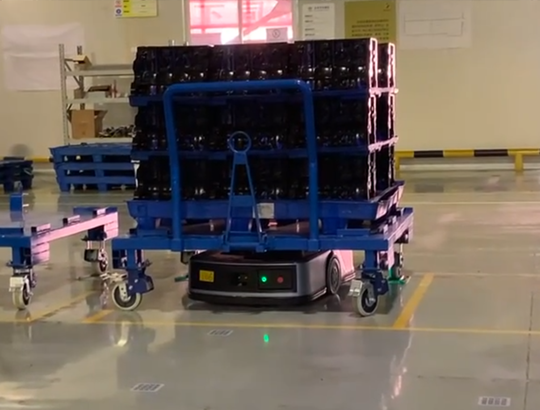
駐車場移動ロボット
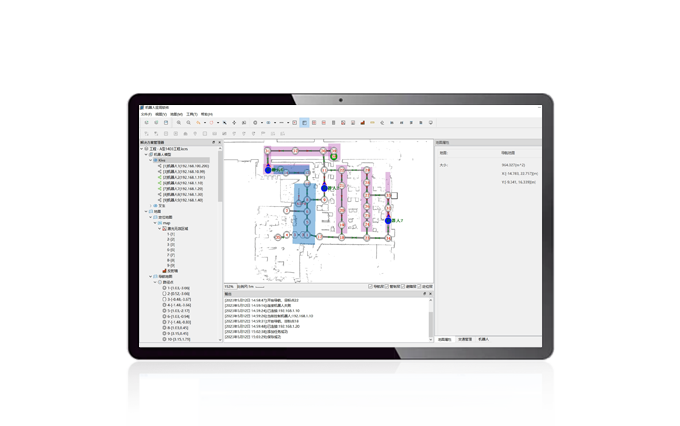
ナビゲーションモード:レーザーナビゲーション
シャーシモード:4つの操舵輪
ナビゲーション精度: ±5mm
シャーシモード:4つの操舵輪
ナビゲーション精度: ±5mm

© 2023 Zhejiang Kecong Control Technology Co., Ltd. 公式ウェブサイト | 移動ロボットに人間のサービスを提供しましょう 浙江省公共ネットワークセキュリティ番号 33052302000842 浙ICP备19001570号-1 sitemap.xml