




































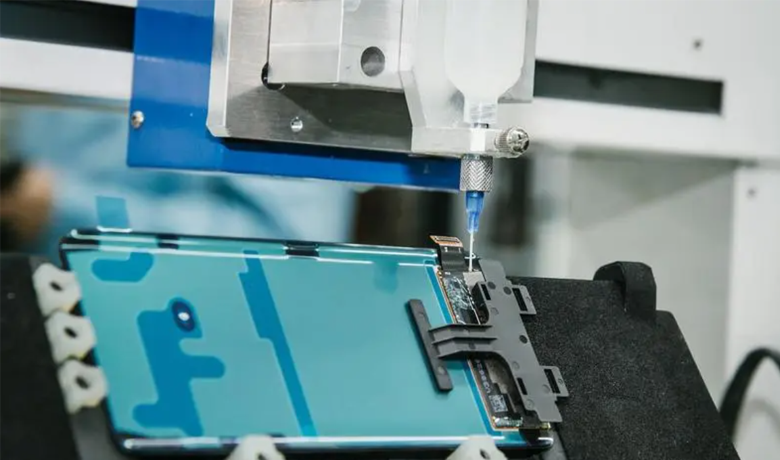







シナリオの概要
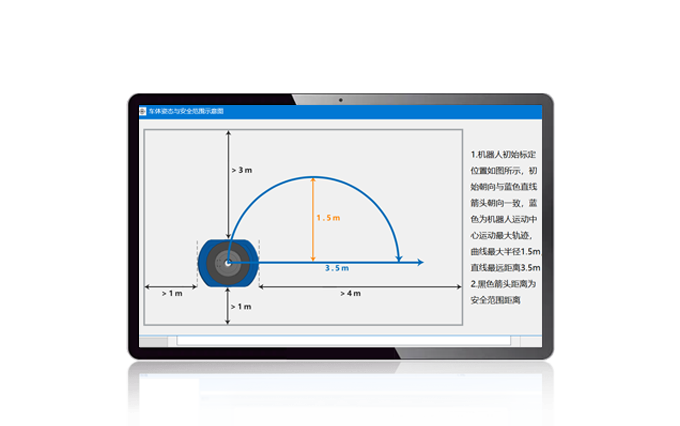
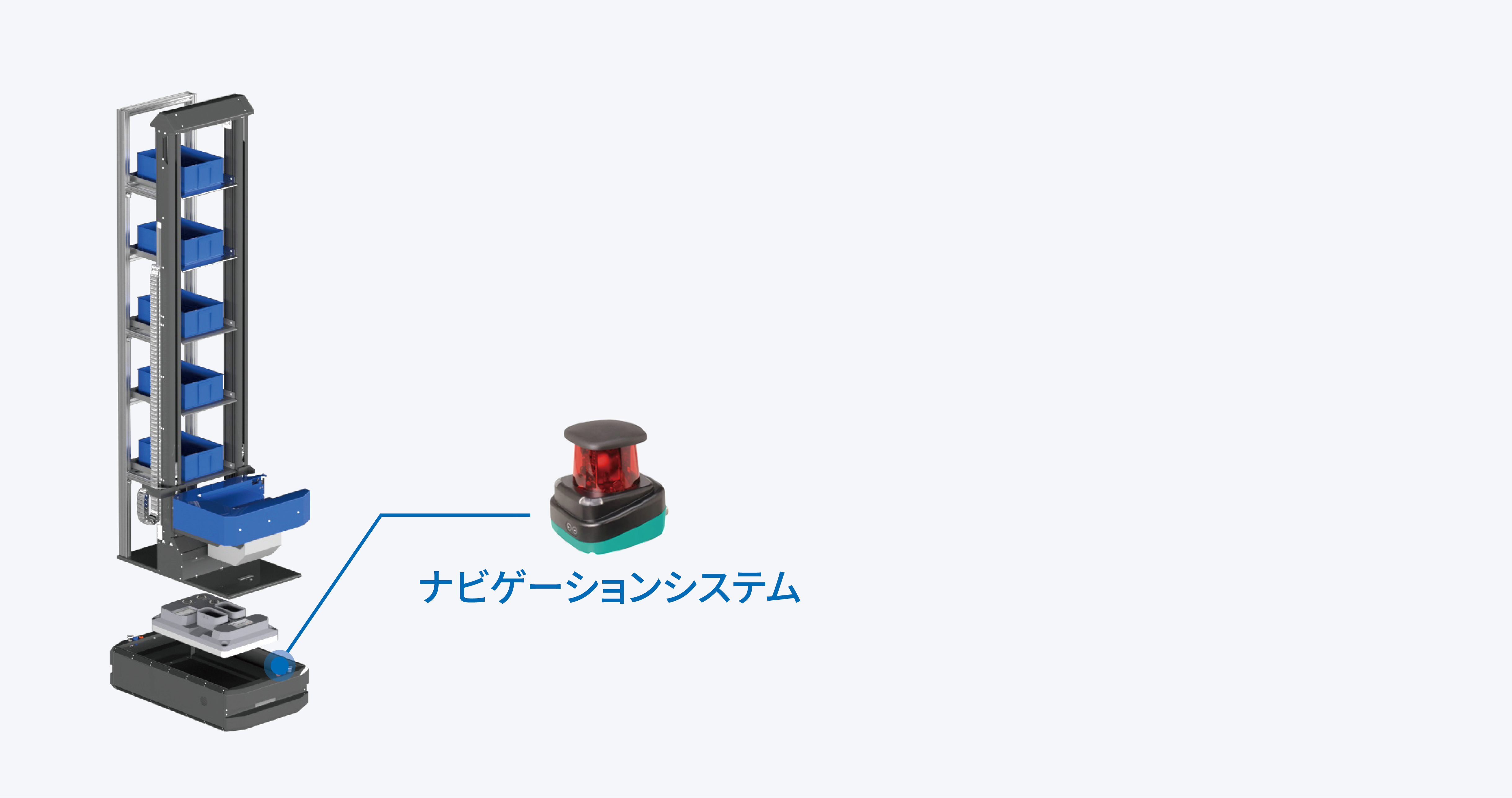
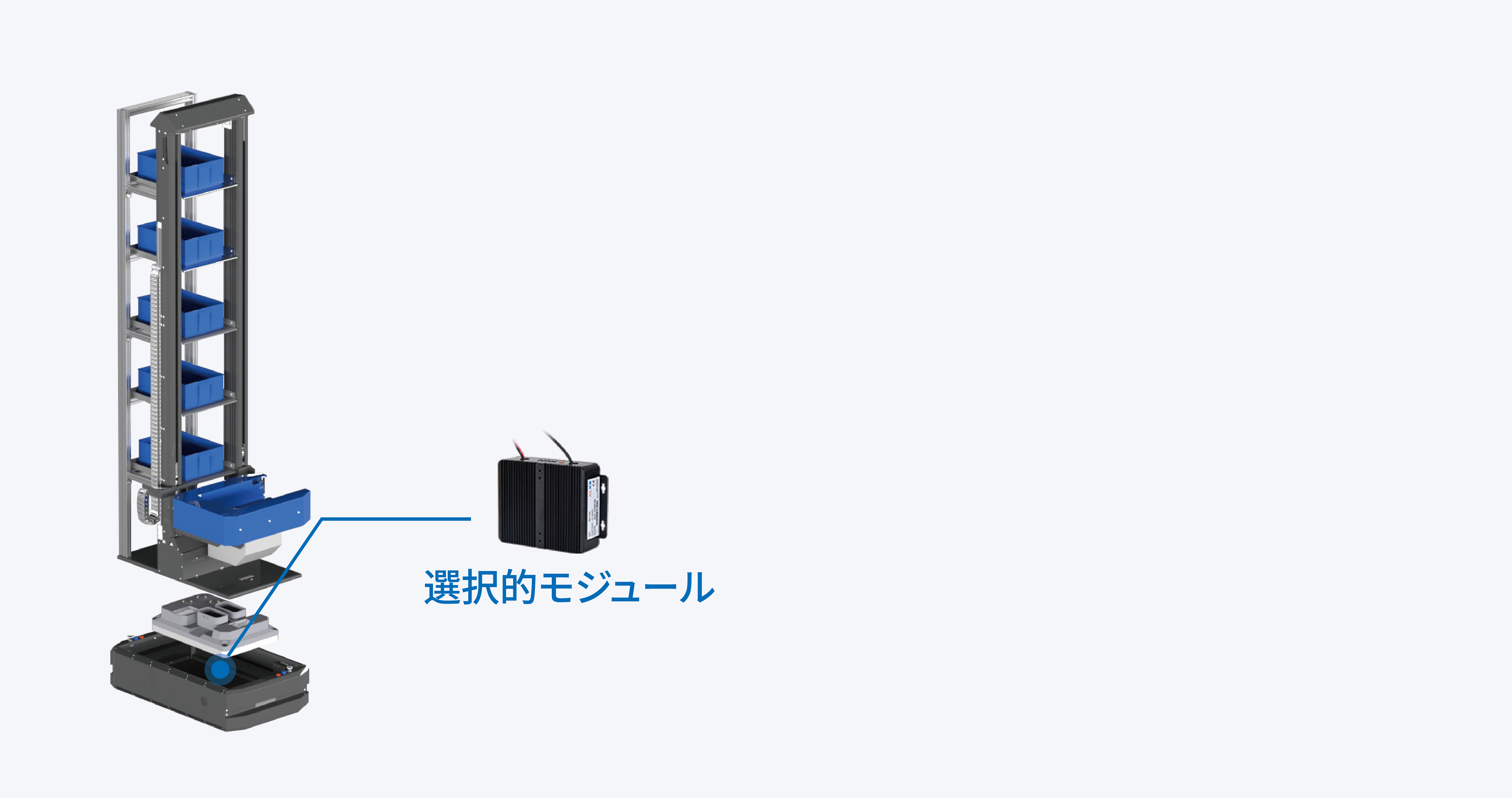
多段箱ロボットは、複数の箱のインテリジェントなピッキング、アクセス、搬送を実現するインテリジェント物流ハンドリング装置です。軌道を使わずに前進、後進、方向転換が可能で、自律航法、アクティブ障害物回避、自動充電などの機能を備えている。
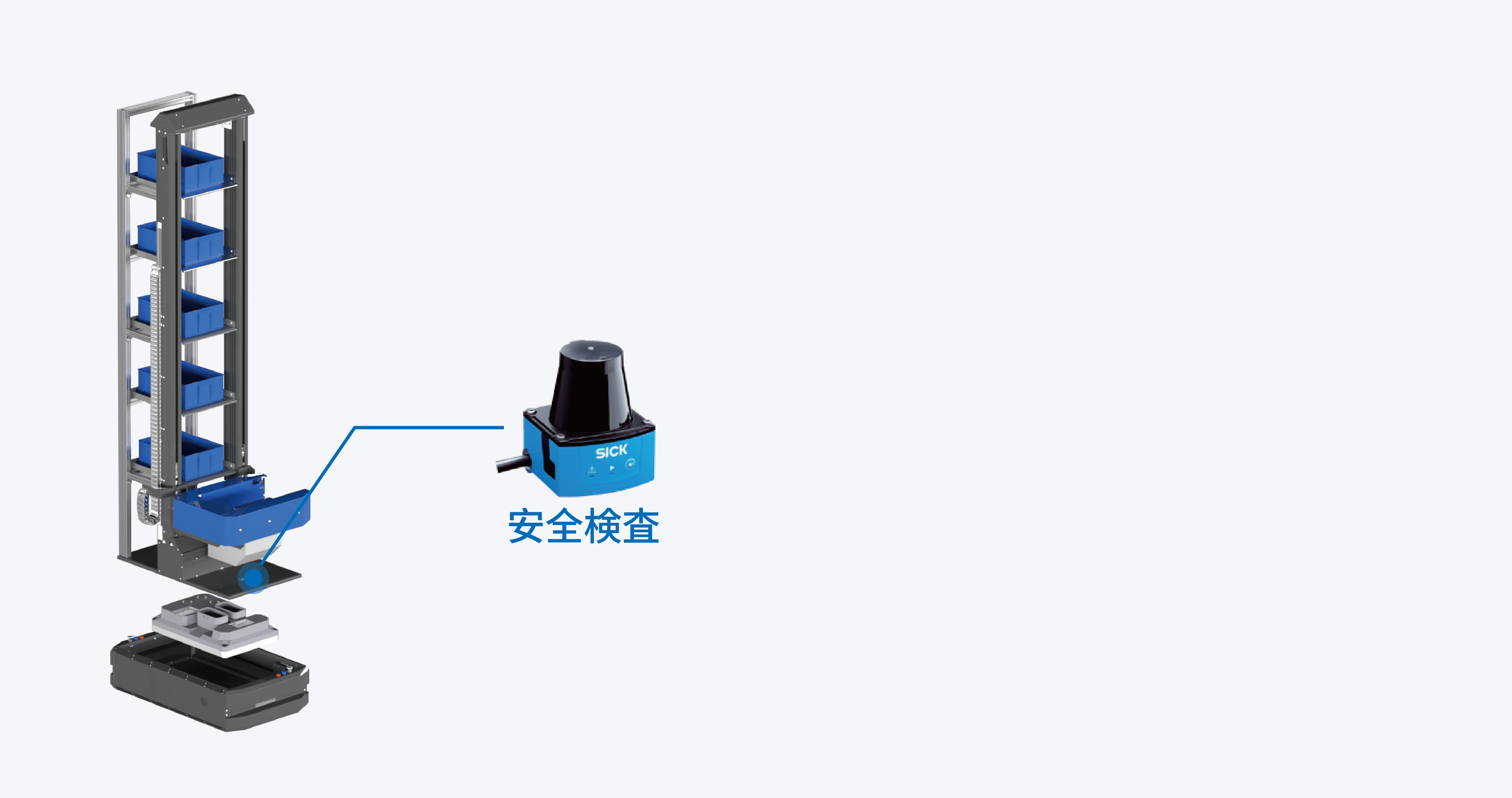
ボックス型移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、豊富なユニットモジュール構成とオプション機能を搭載。
ボックス型移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、豊富なユニットモジュール構成とオプション機能を搭載。
スキーム構成


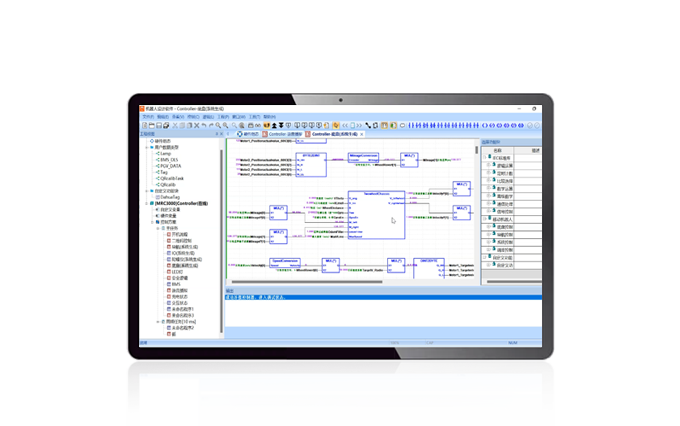
ユニバーサルコントローラ

AMR 移動ロボットコントローラ

QRコードナビゲーション専用コントローラ

激光传感器
激光传感器

安全激光传感器

二维码相机


デフホイール

ドライバ

モーター

モーター

障害物回避用レーザーセンサー

障害物回避用レーザーセンサー

障害物回避用レーザーセンサー


ハンドオペレーター

ポケベルモジュール

車載ディスプレイ

照明

スイッチ


ワイヤレスクライアント
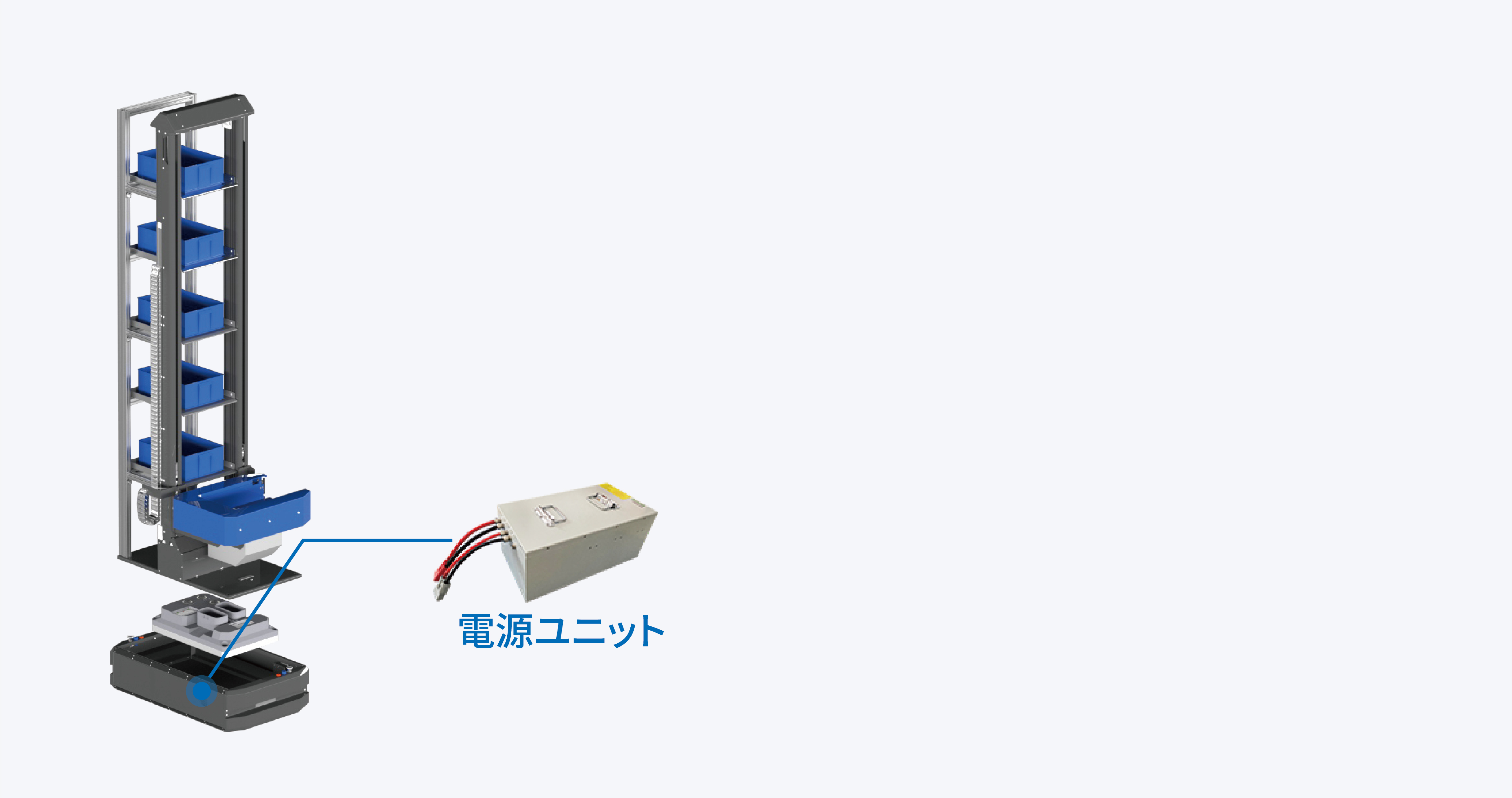
電池

電池

QRコードカメラ

視覚障害物回避モジュール

デュアルレンズカメラ
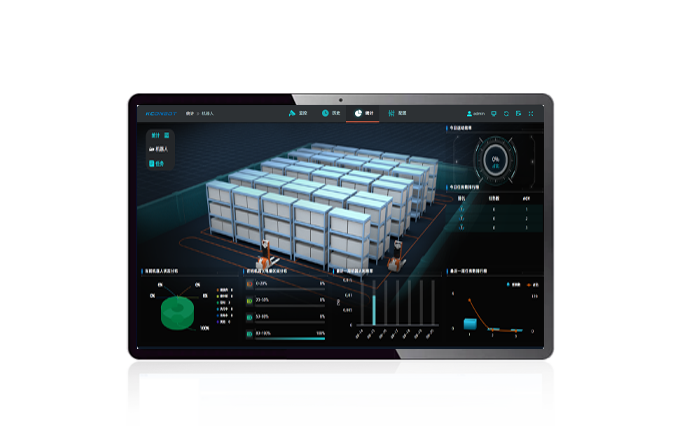
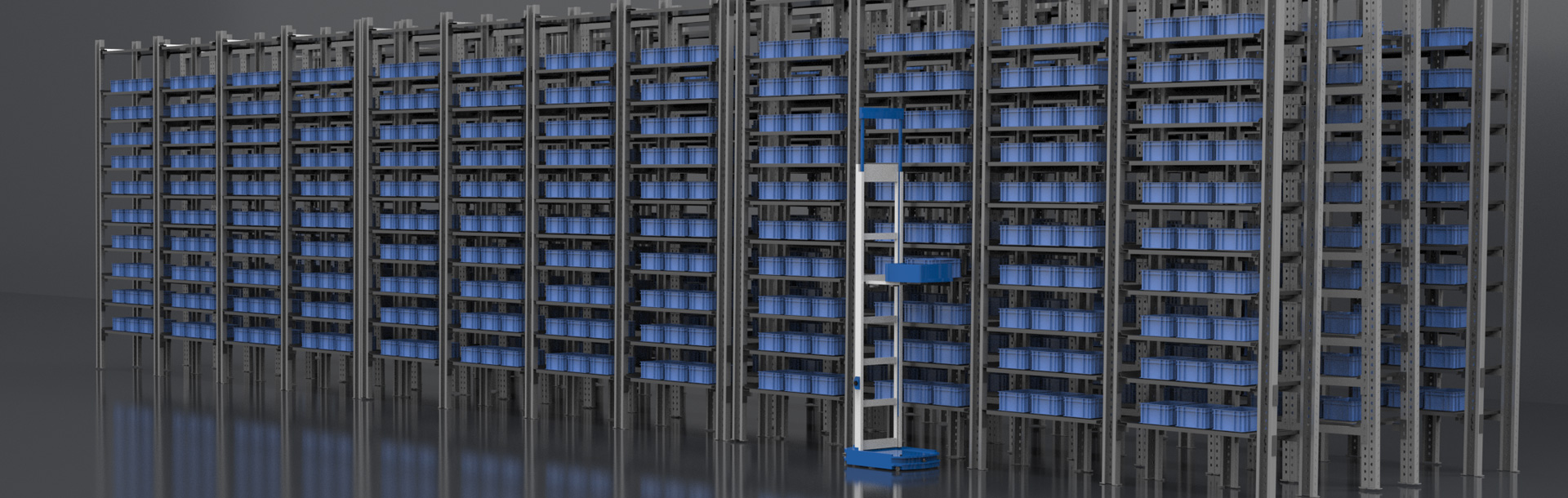
関連事例

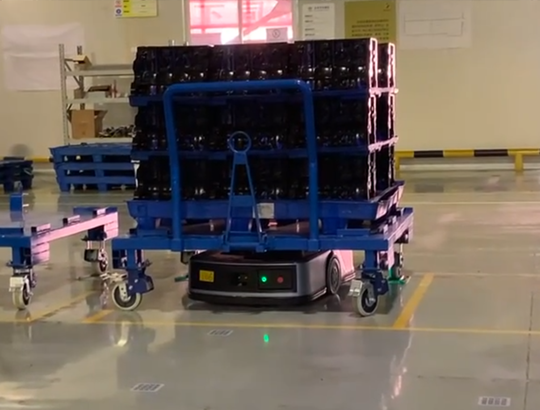
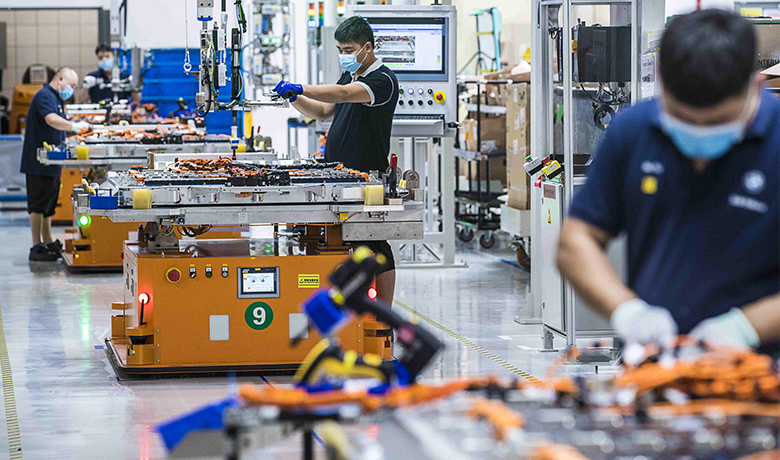
ケースハンドリング型移動ロボット
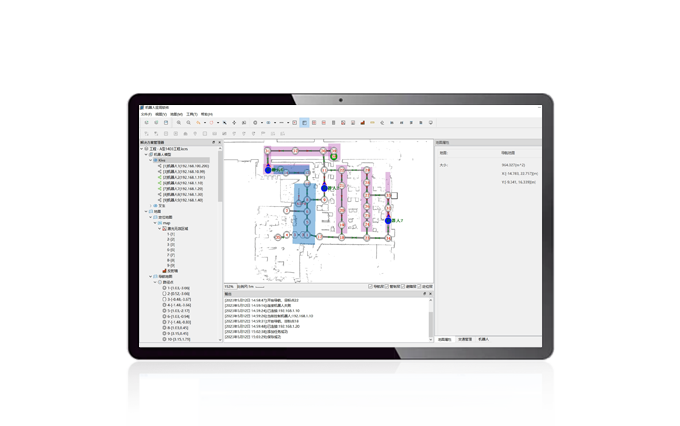
ナビゲーション:QRコードナビゲーション
シャシーモード:2輪駆動ディファレンシャル
ナビゲーション精度:±10mm
シャシーモード:2輪駆動ディファレンシャル
ナビゲーション精度:±10mm

© 2023 Zhejiang Kecong Control Technology Co., Ltd. 公式ウェブサイト | 移動ロボットに人間のサービスを提供しましょう 浙江省公共ネットワークセキュリティ番号 33052302000842 浙ICP备19001570号-1 sitemap.xml