












































ソフトウェアの紹介
科聪ロボットディスパッチングシステム V5.2.0 は、多エージェントのスケジューリングおよびタスク管理のためのプラットフォーム型システムです。
多様なAIアルゴリズムを採用し、モバイルロボット群の 経路計画、交通管理、タスク割り当て、生産能力最適化、可視化状態監視、マップの維持・共有、複数機種の協調ディスパッチ などをリアルタイムで処理します。
さらに、オープン標準のAPIとSDKを提供し、顧客の業務システムとの開発連携や低レベルでの統合を容易に実現します。
主な機能

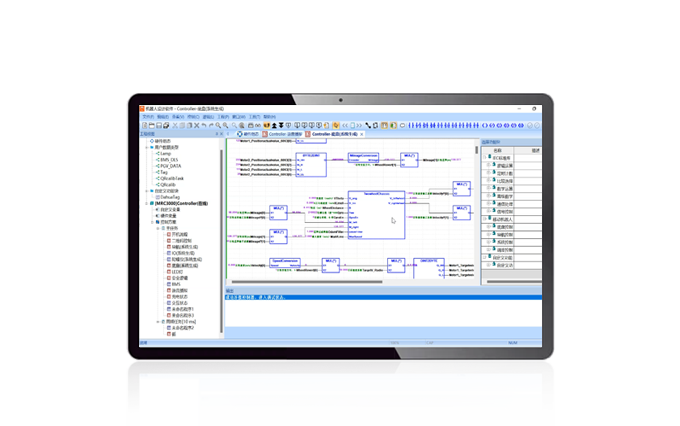
ビジネスアルゴリズム効率化
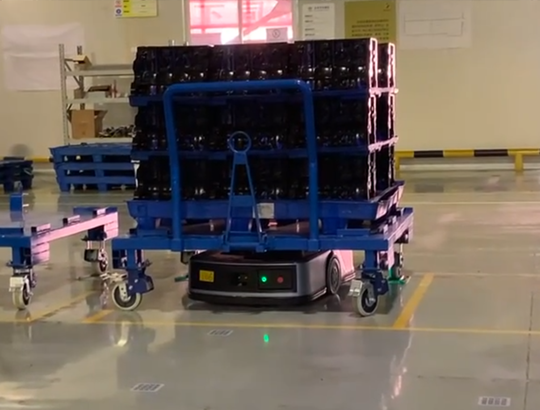
業務ニーズと設備状況に応じて 最適なタスク経路を動的に割り当て。
複数車両の並行経路を交通制御し、経路衝突を効果的に回避。
工程特性と作業優先度に基づき マルチタスクの並列スケジューリングを実現。
実行前に潜在的な衝突ポイントを予測し、事前に調整することで 遅延や異常を最小化します。
複数車両の並行経路を交通制御し、経路衝突を効果的に回避。
工程特性と作業優先度に基づき マルチタスクの並列スケジューリングを実現。
実行前に潜在的な衝突ポイントを予測し、事前に調整することで 遅延や異常を最小化します。
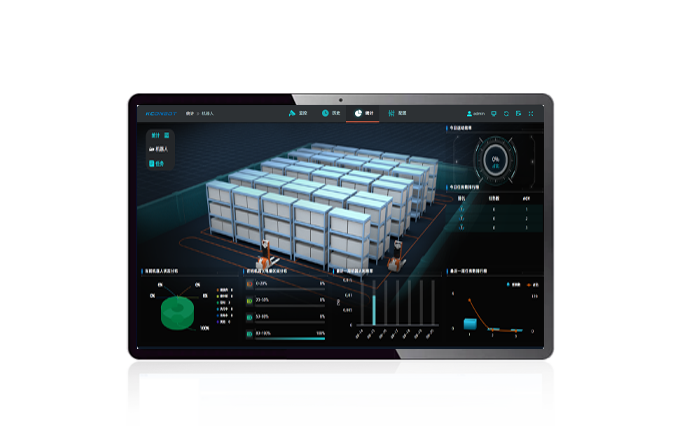
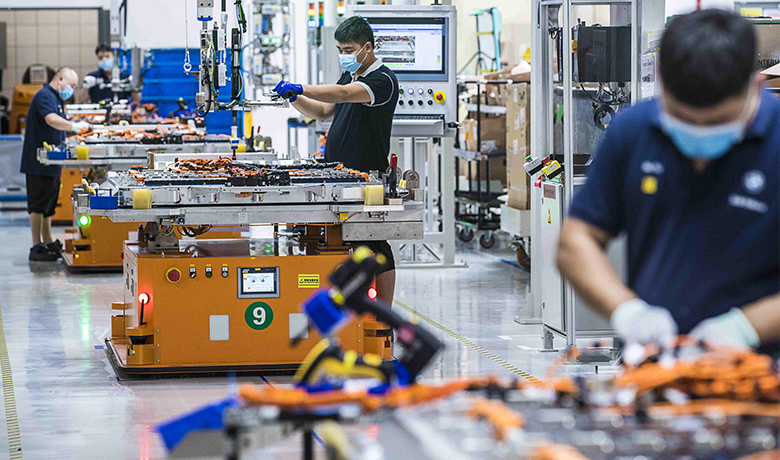
タスク状態アラート & 映像再生
リアルタイムでタスクの進行状況を監視し、異常を即時に検知・フィードバック。
貨物の詰まりやタスクのタイムアウトが発生した場合は 自動的にアラートを発報し、車載端末と監視プラットフォームへ同期通知。
さらに 映像の保存・再生機能を備え、ユーザーは過去1か月の作業映像を追跡・確認できます。
貨物の詰まりやタスクのタイムアウトが発生した場合は 自動的にアラートを発報し、車載端末と監視プラットフォームへ同期通知。
さらに 映像の保存・再生機能を備え、ユーザーは過去1か月の作業映像を追跡・確認できます。

シミュレーションシステム機能
90%以上のシミュレーション精度を実現し、1,000台以上のAGV同時稼働をサポート。
シミュレーションと実機の連携により、ソリューションの 実現可能性と堅牢性を検証します。
シミュレーションと実機の連携により、ソリューションの 実現可能性と堅牢性を検証します。

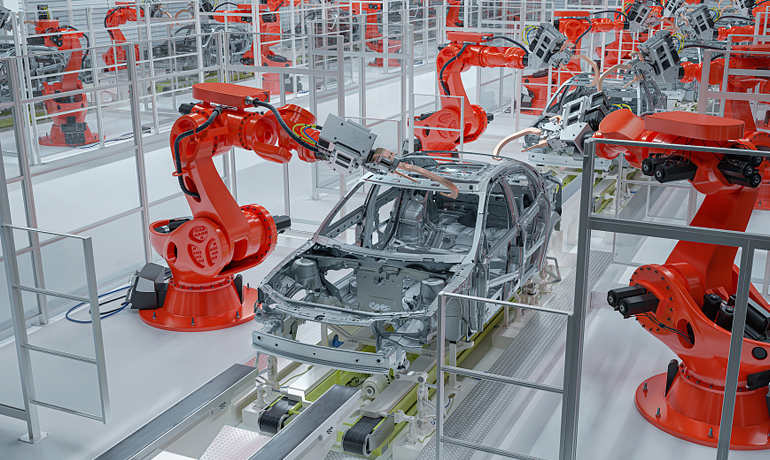
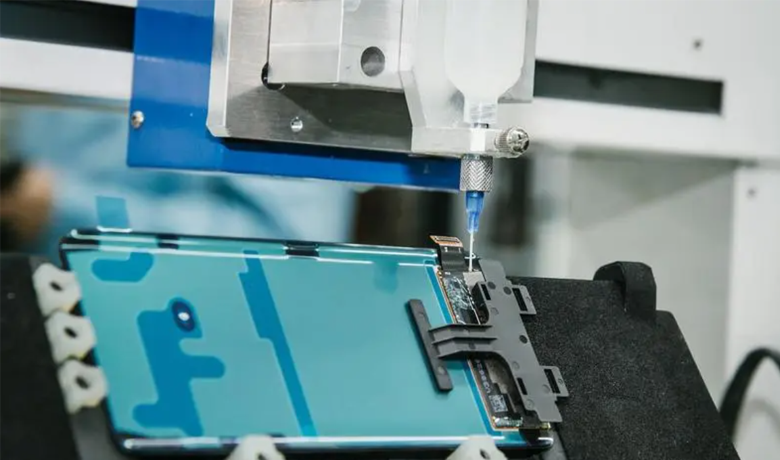
工作機械との連携
システムは工作機械とシームレスに接続し、工程ニーズに基づいて 自動的に搬送タスクを生成。
柔軟な生産プロセスの連携を実現します。
柔軟な生産プロセスの連携を実現します。

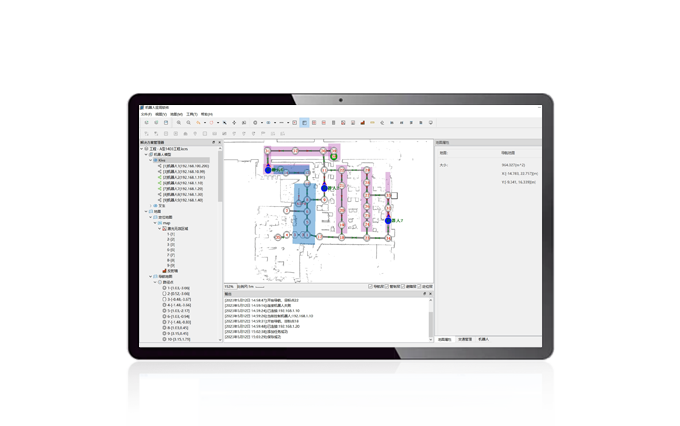
過去タスク・ログ照会 & ビジネス可視化
過去のタスクやログを検索・分析し、業務追跡や異常特定を容易に。
蓄積データの統計分析により、企業の スケジューリング戦略やリソース配分の最適化を支援します。
蓄積データの統計分析により、企業の スケジューリング戦略やリソース配分の最適化を支援します。

シンプルな設定 & クイックデプロイ
標準化された設定プロセスにより、短期間でシステム導入と業務検証を完了。
迅速な立ち上げで 生産投入を加速します。
迅速な立ち上げで 生産投入を加速します。

© 2023 Zhejiang Kecong Control Technology Co., Ltd. 公式ウェブサイト | 移動ロボットに人間のサービスを提供しましょう 浙江省公共ネットワークセキュリティ番号 33052302000842 浙ICP备19001570号-1 sitemap.xml