











































シナリオの概要
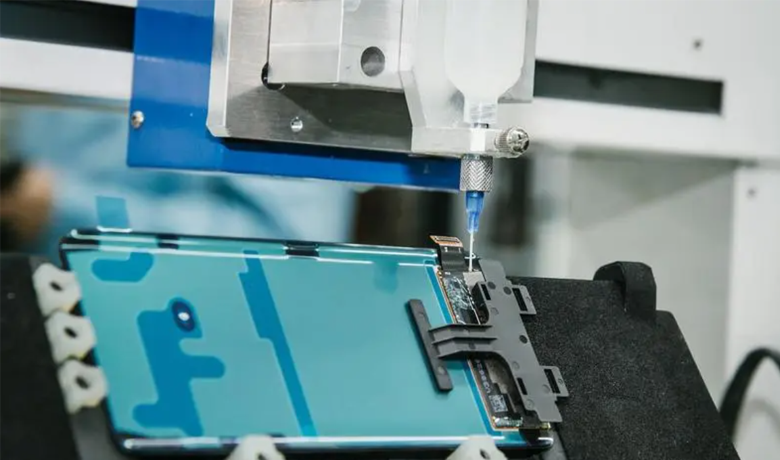
協調型(複合型)移動ロボットは、無人ハンドリングシャーシにメカニカルアームを追加して協調型AGVを形成し、移動ロボットと設備機械の間で材料の積み下ろしを完了することができ、また、機械上の視覚センサーを使用することもできます。材料を加工するアーム、包括的なテスト。
協調型(複合型)移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、主に制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能に分けられます。 9つの主要なユニットモジュールで構成されています。
協調型(複合型)移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、主に制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能に分けられます。 9つの主要なユニットモジュールで構成されています。
スキーム構成


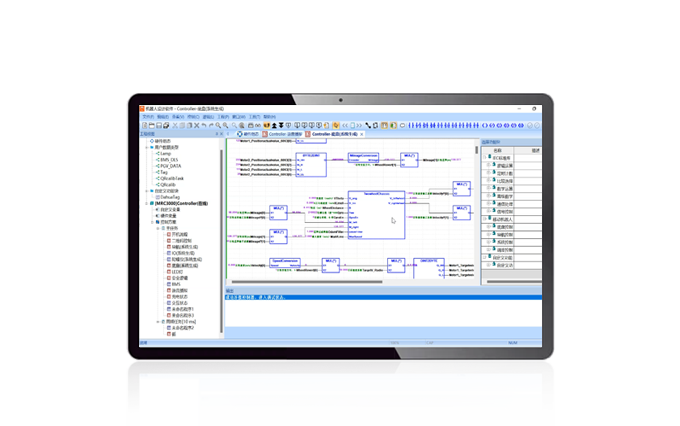
ユニバーサルコントローラ

差動移動ロボットコントローラ

QRコードナビゲーション専用コントローラ
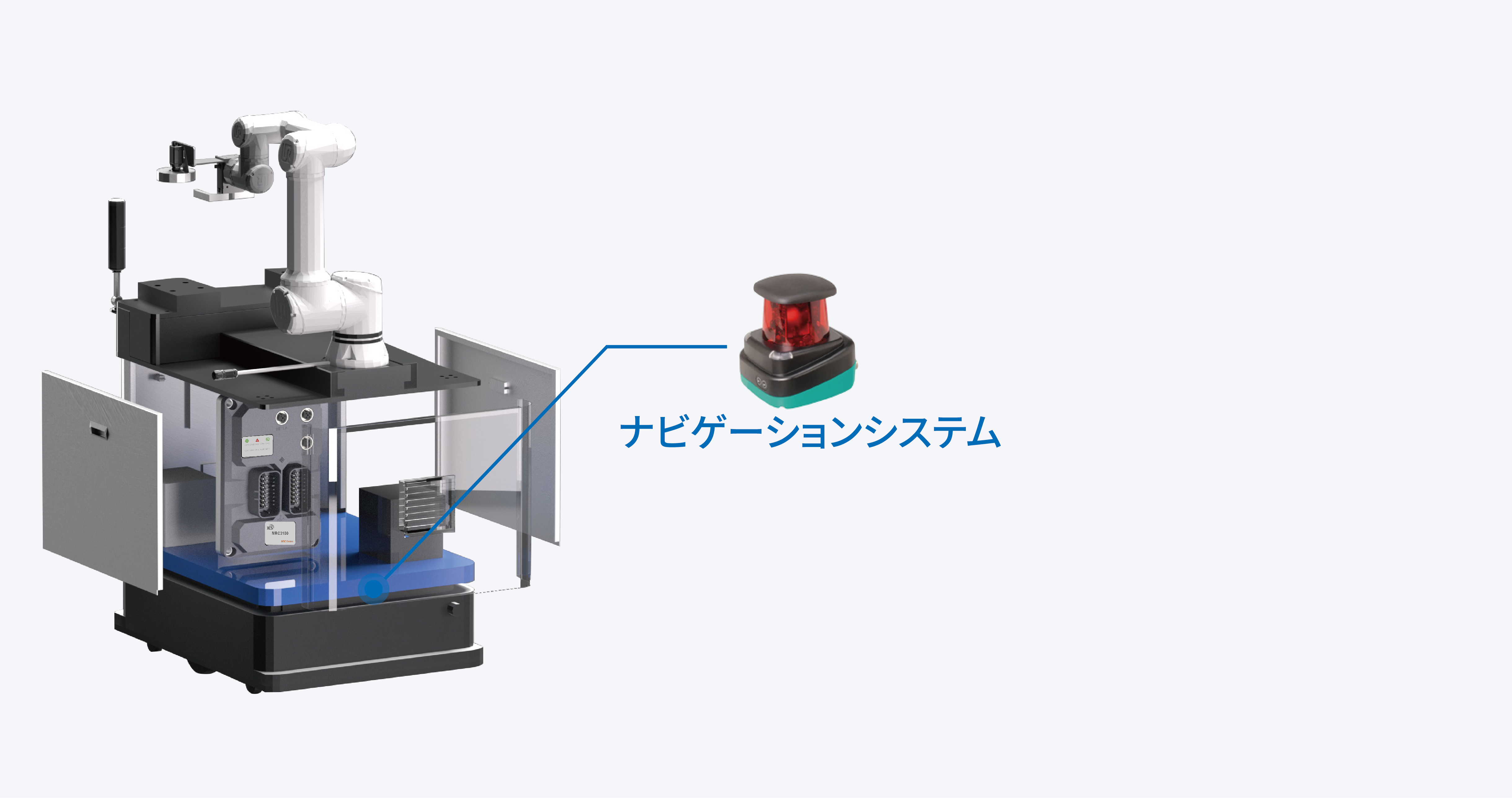

レーザーセンサー
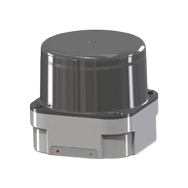
レーザーセンサー

QRコードカメラ

デフホイール

マクナミーホイール
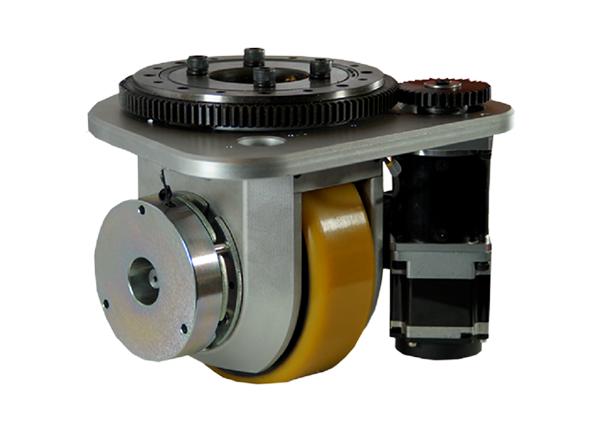
駆動輪

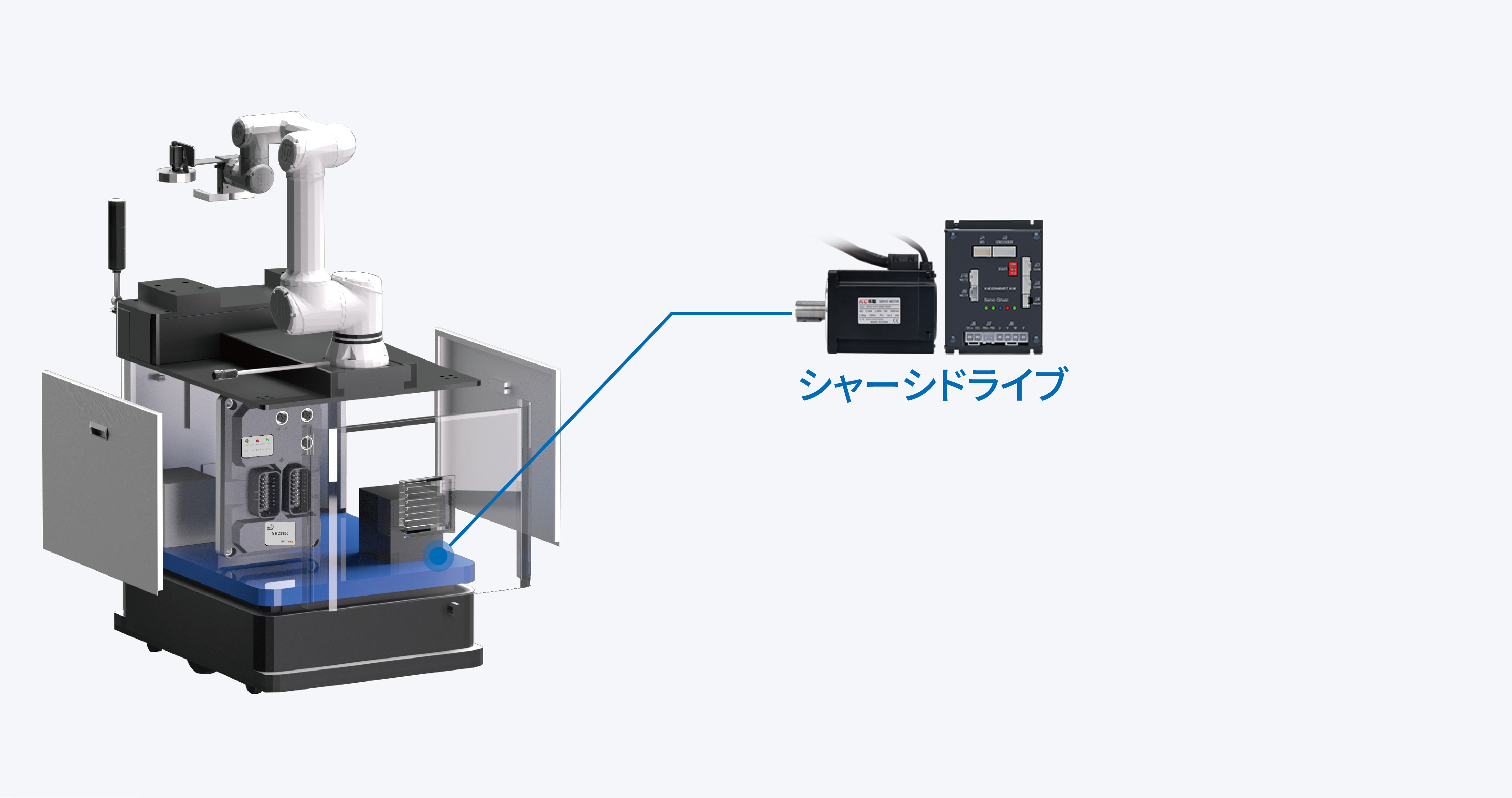
ドライバ

サーボモーター


ロボットアーム
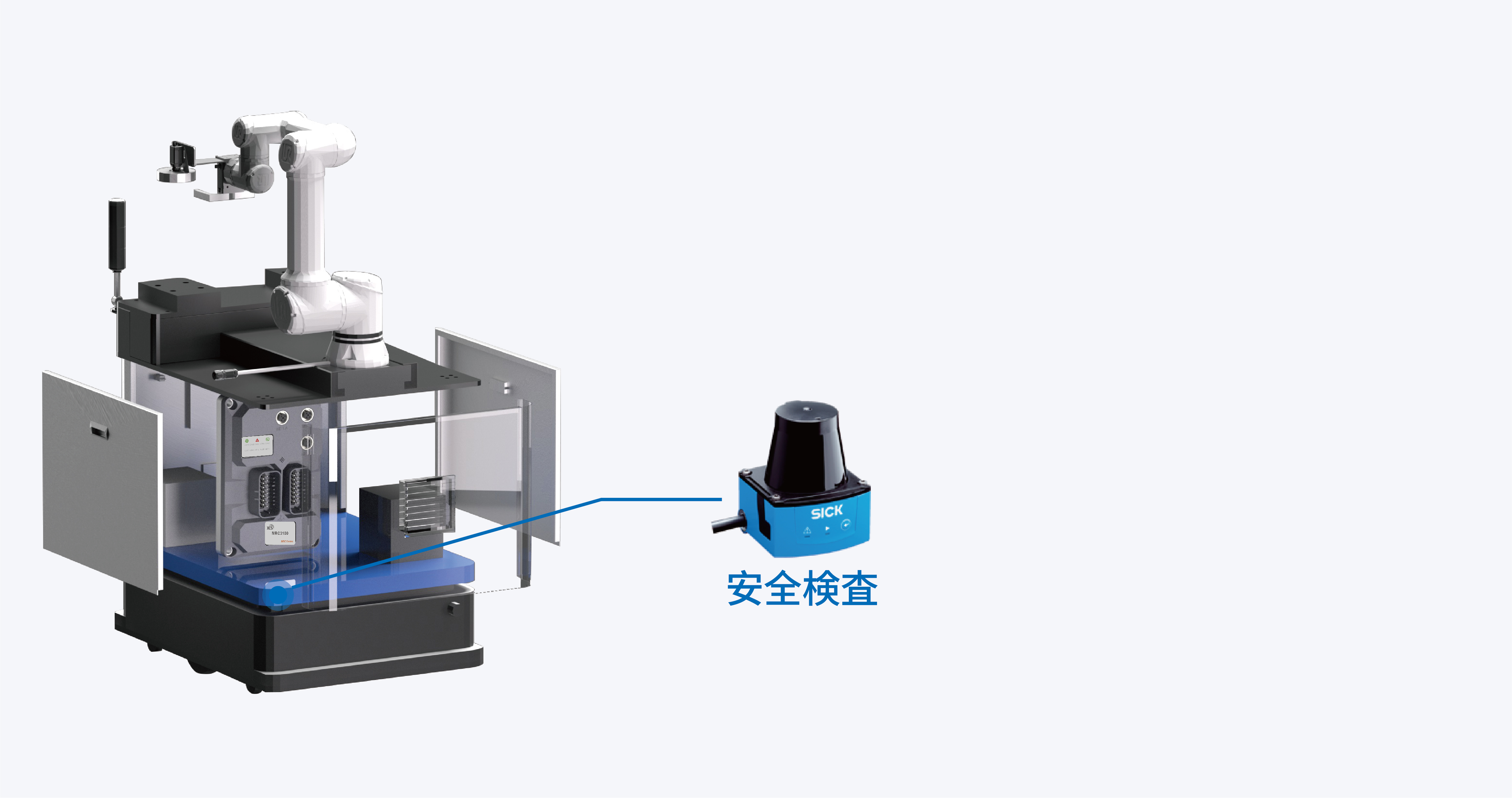

障害物回避レーザー

視覚障害物回避
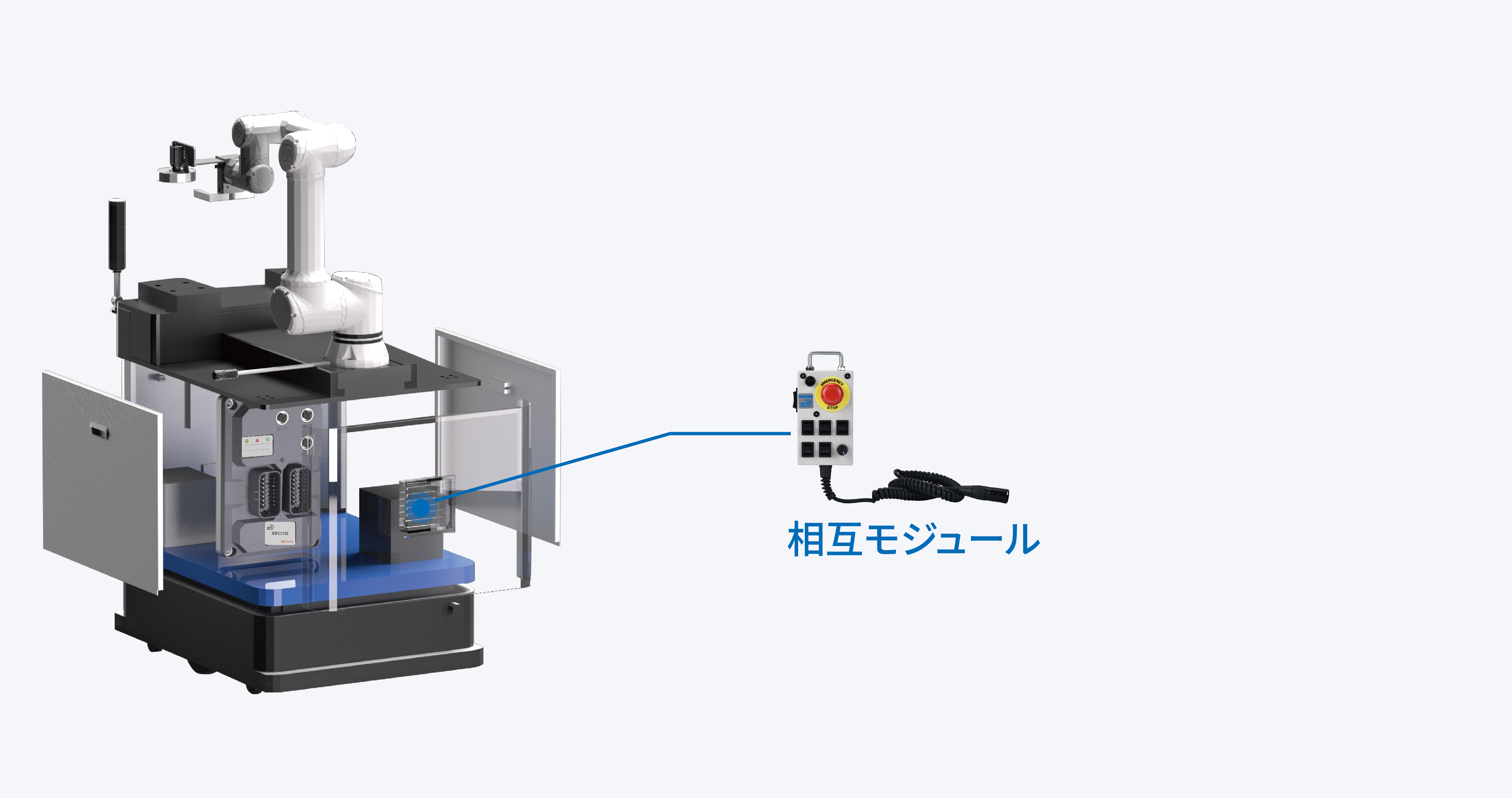

ワイヤードハンドオペレーター

ポケベルモジュール

車載ディスプレイ

スイッチ

照明
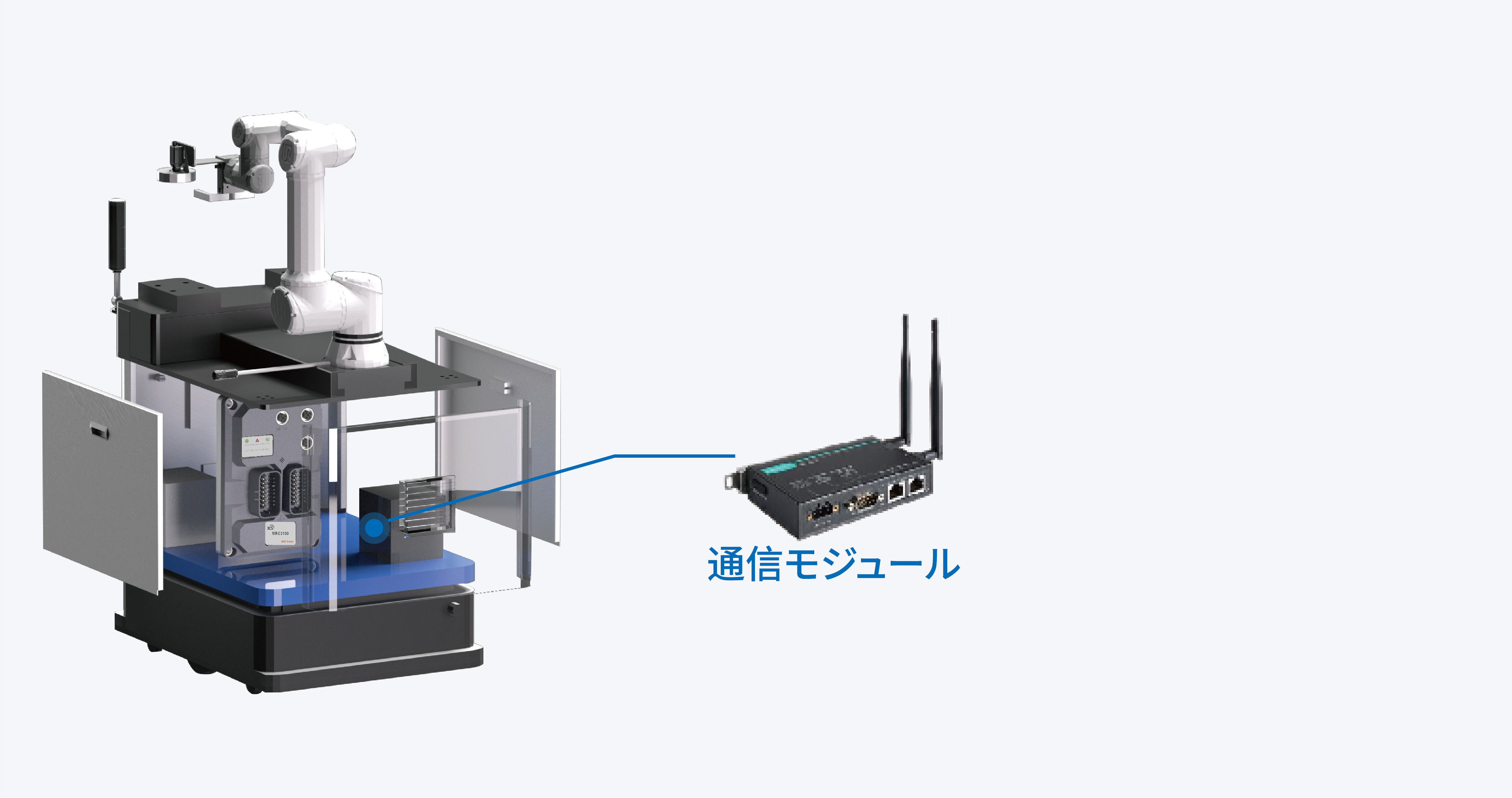

ワイヤレスクライアント
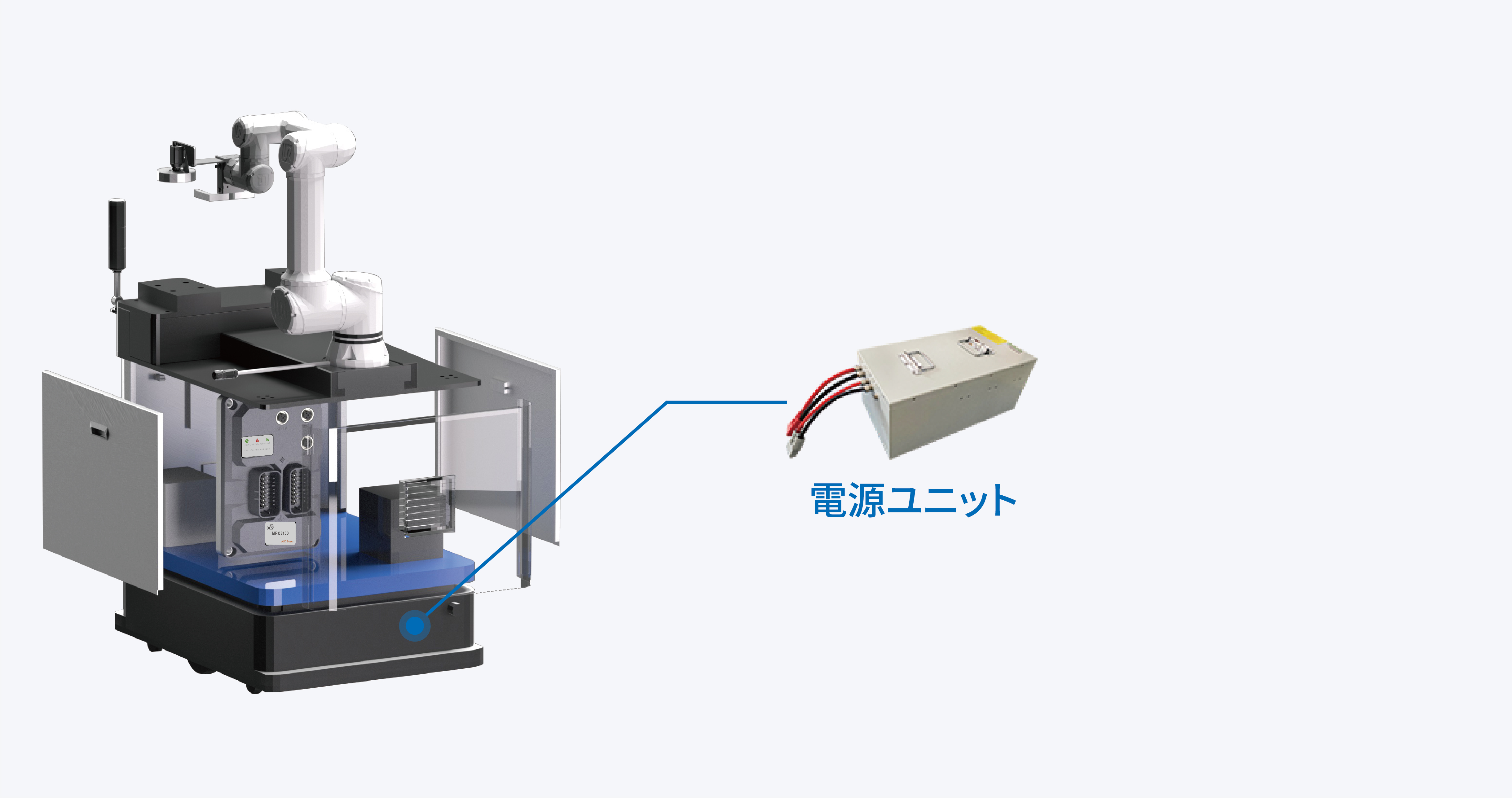
電池

電池


QRコードカメラ

視覚障害物回避モジュール

デュアルレンズカメラ
関連事例

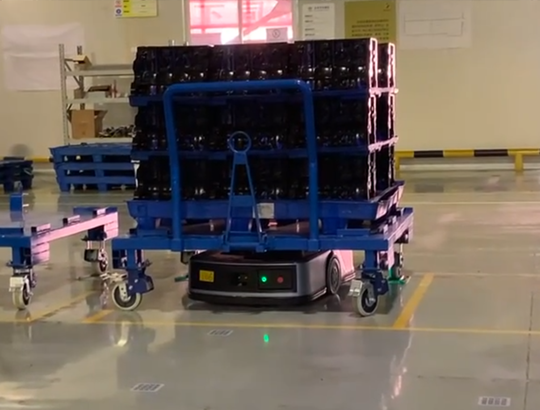
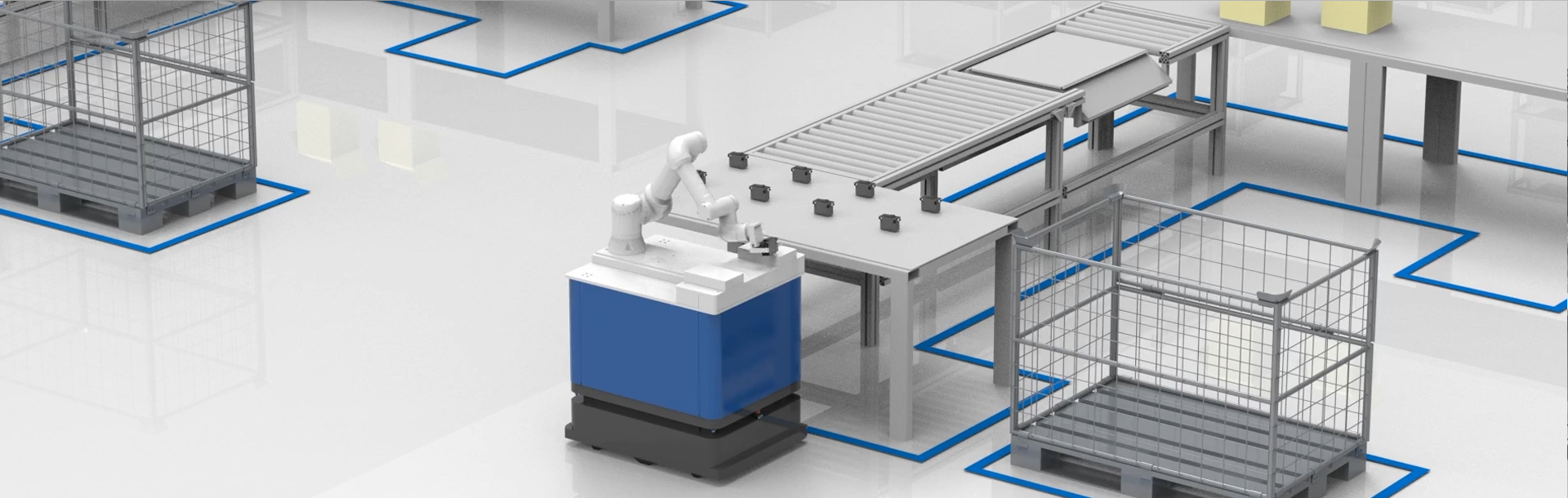
協調(複合)型移動ロボット
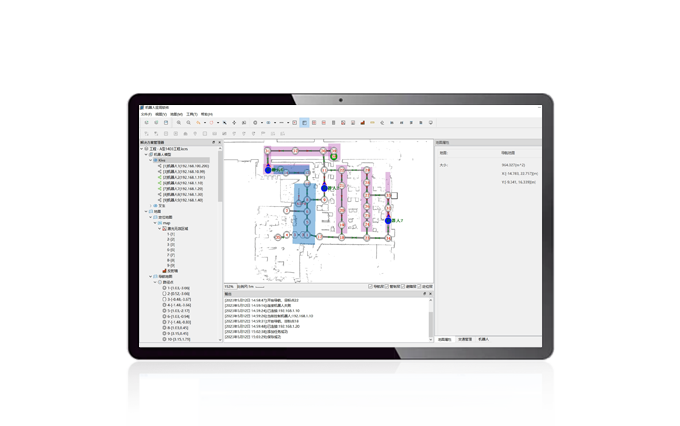
ナビゲーションモード:レーザー(ナチュラル)ナビゲーション
シャーシモード:二輪駆動差動シャーシ
ナビゲーション精度:±5ミリメートル
シャーシモード:二輪駆動差動シャーシ
ナビゲーション精度:±5ミリメートル

© 2023 Zhejiang Kecong Control Technology Co., Ltd. 公式ウェブサイト | 移動ロボットに人間のサービスを提供しましょう 浙江省公共ネットワークセキュリティ番号 33052302000842 浙ICP备19001570号-1 sitemap.xml