











































シナリオの概要
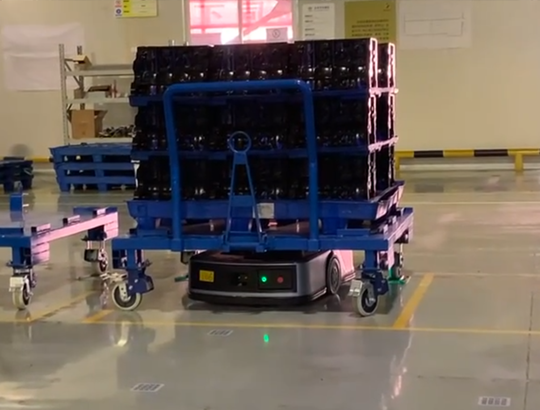
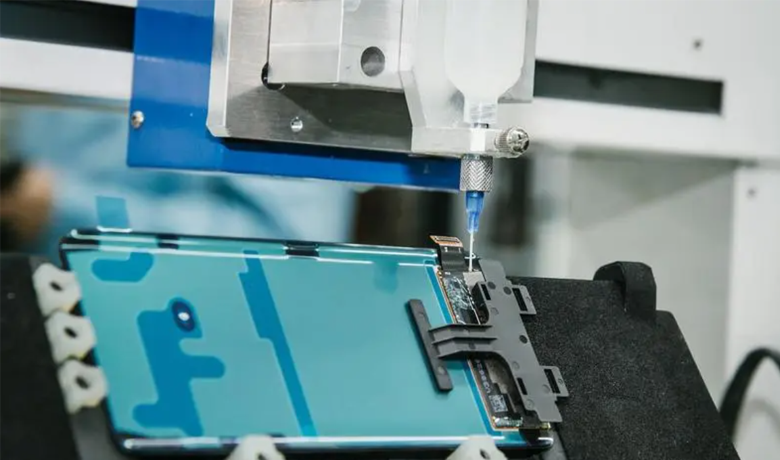
背負い型移動ロボットはリュックサックを背負って材料や運搬物などの対象物を所定の場所に運搬し、工場や生産ラインでの無人運転を実現する。
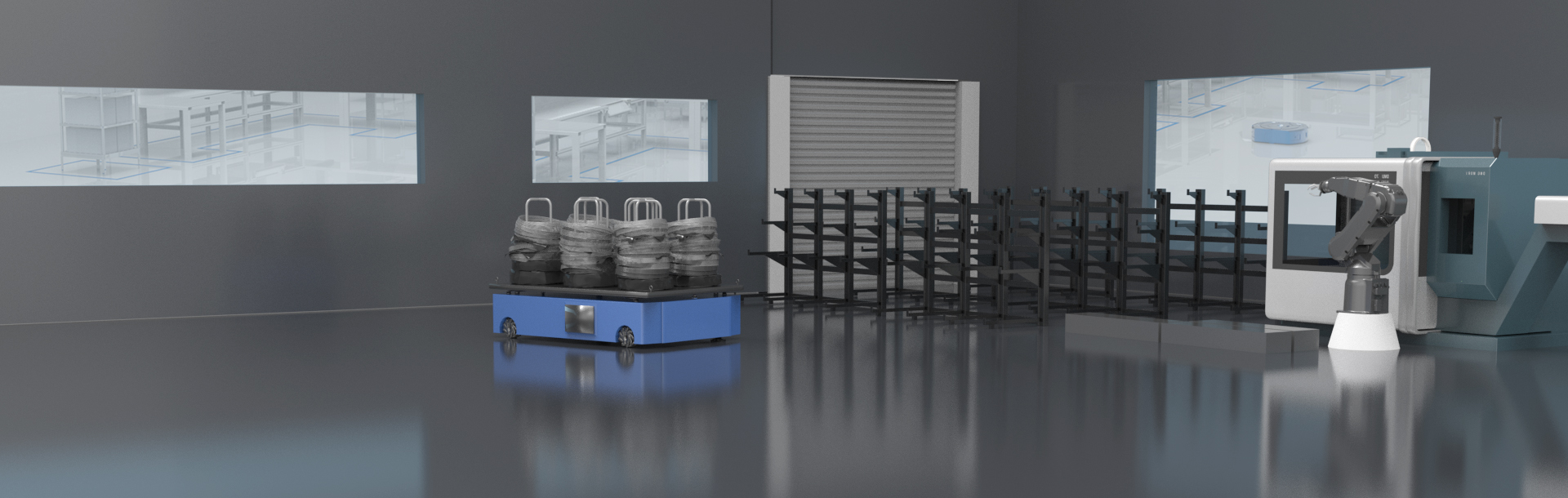
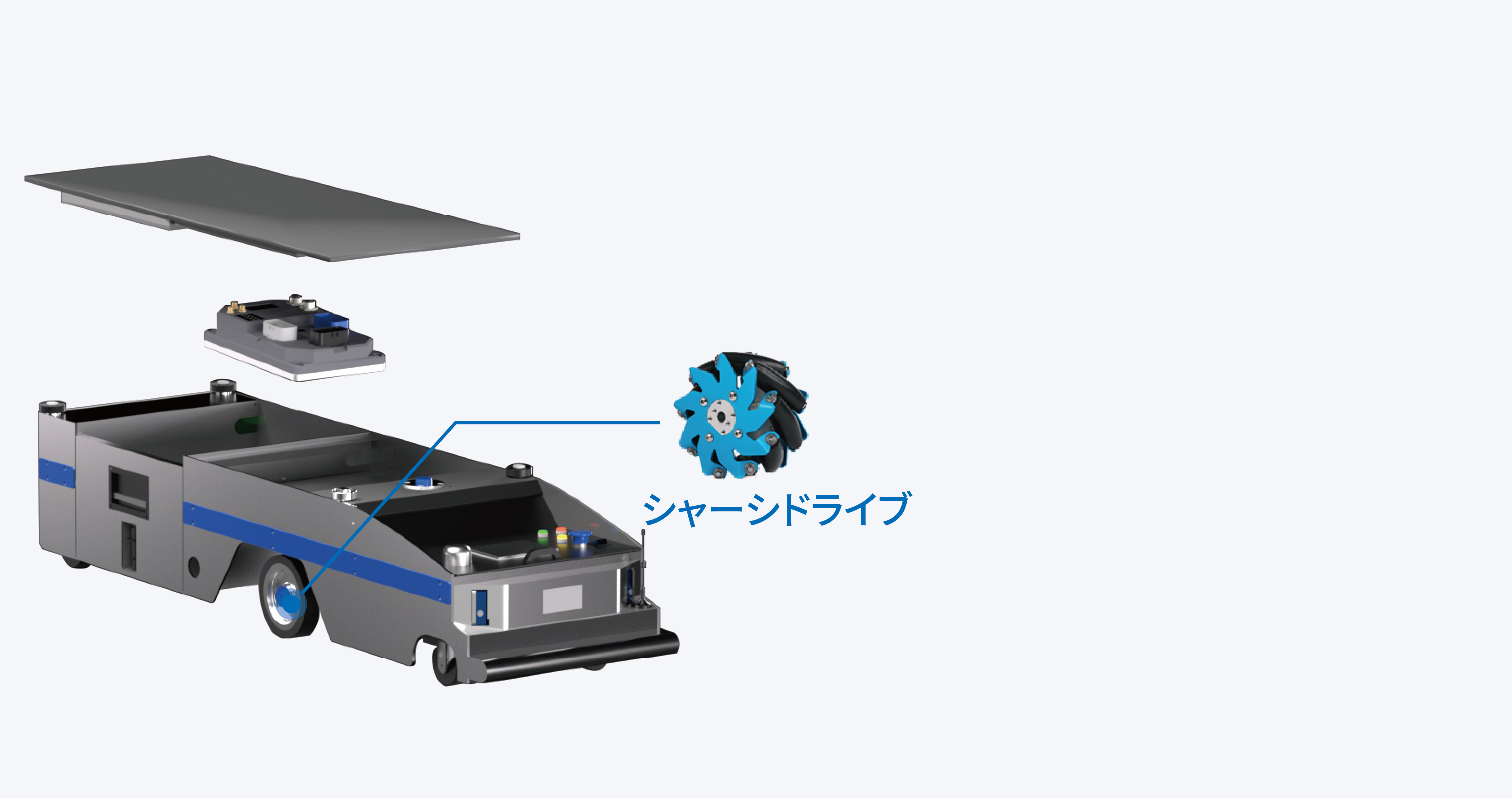
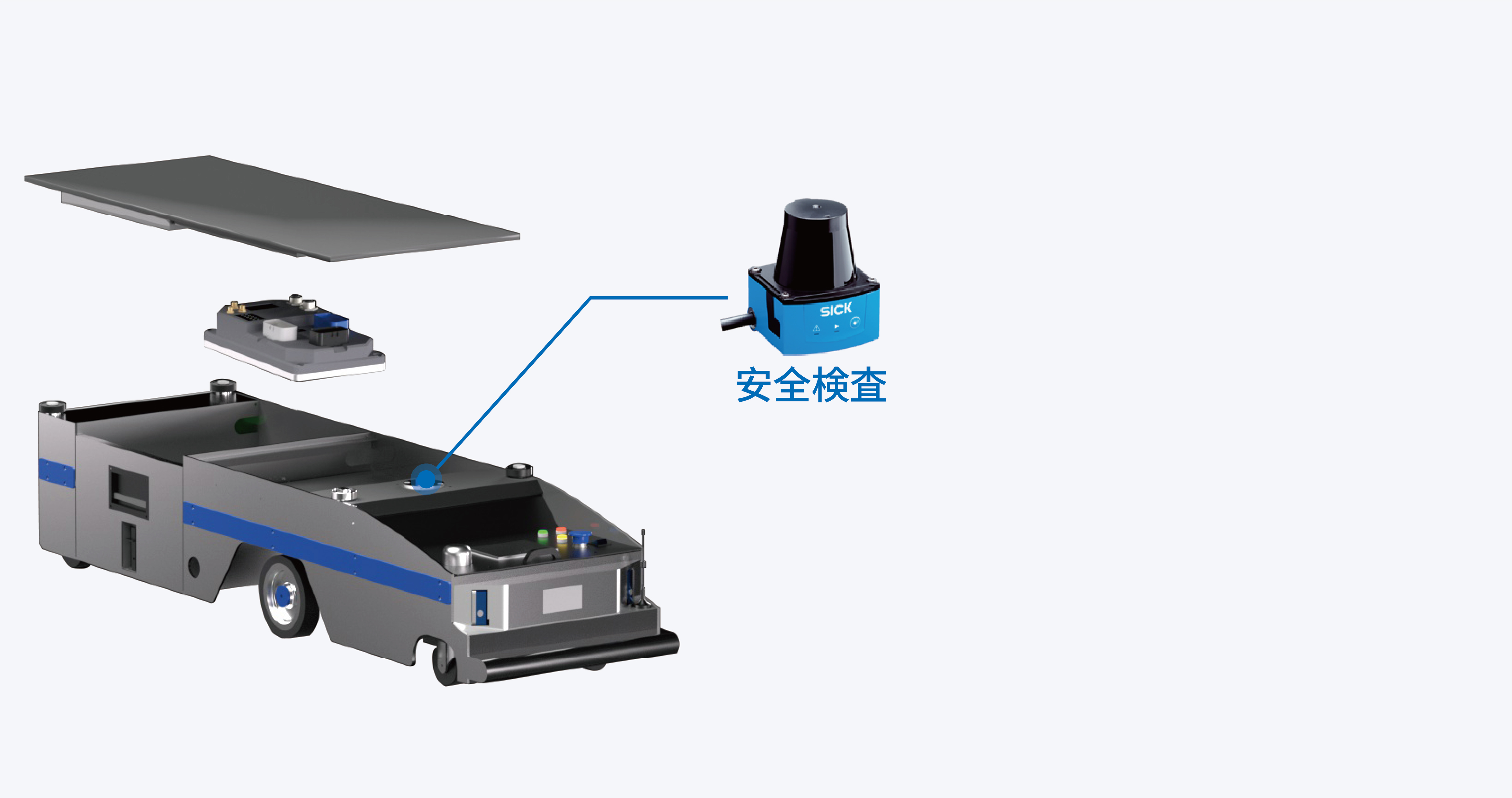
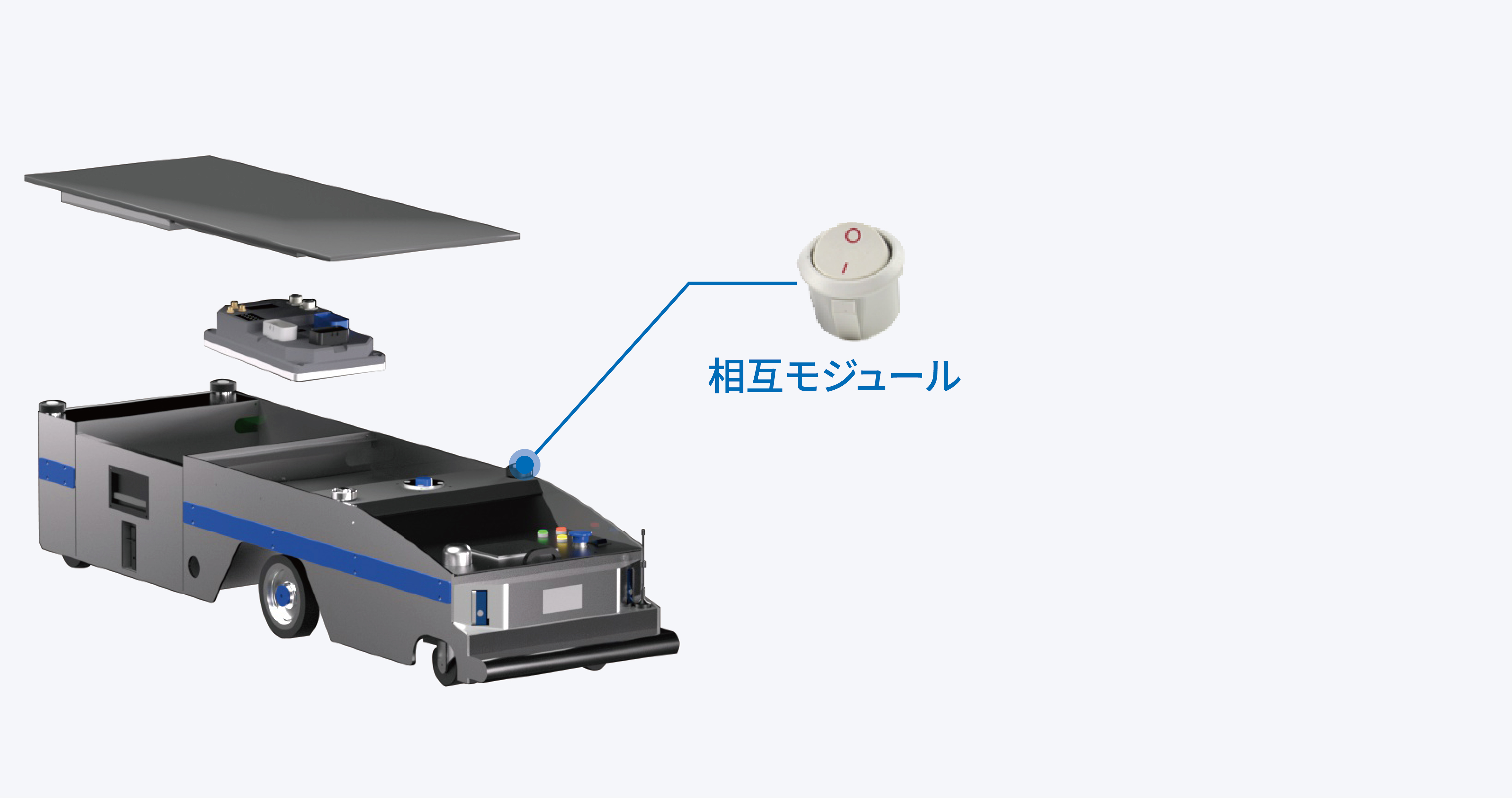
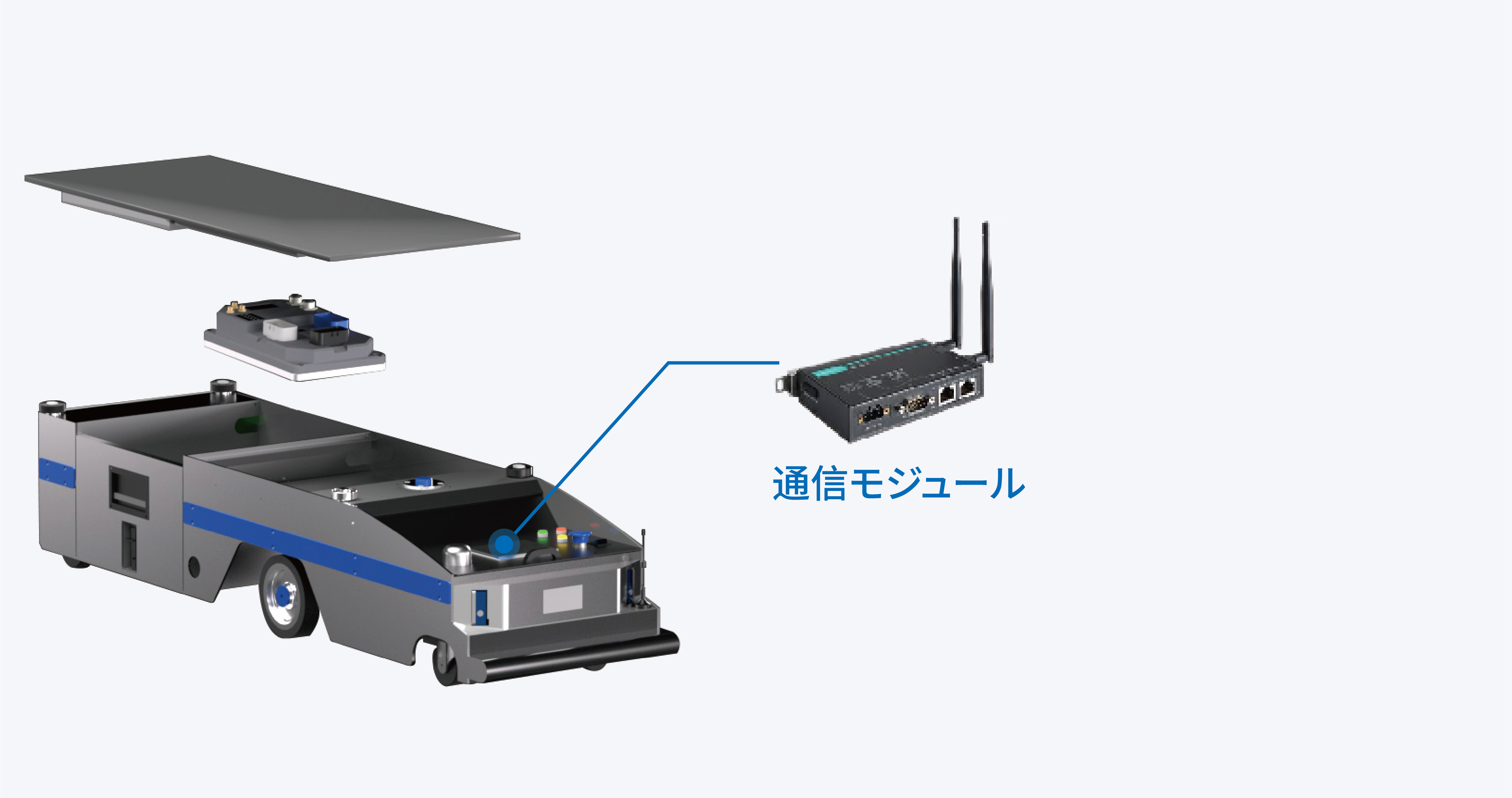
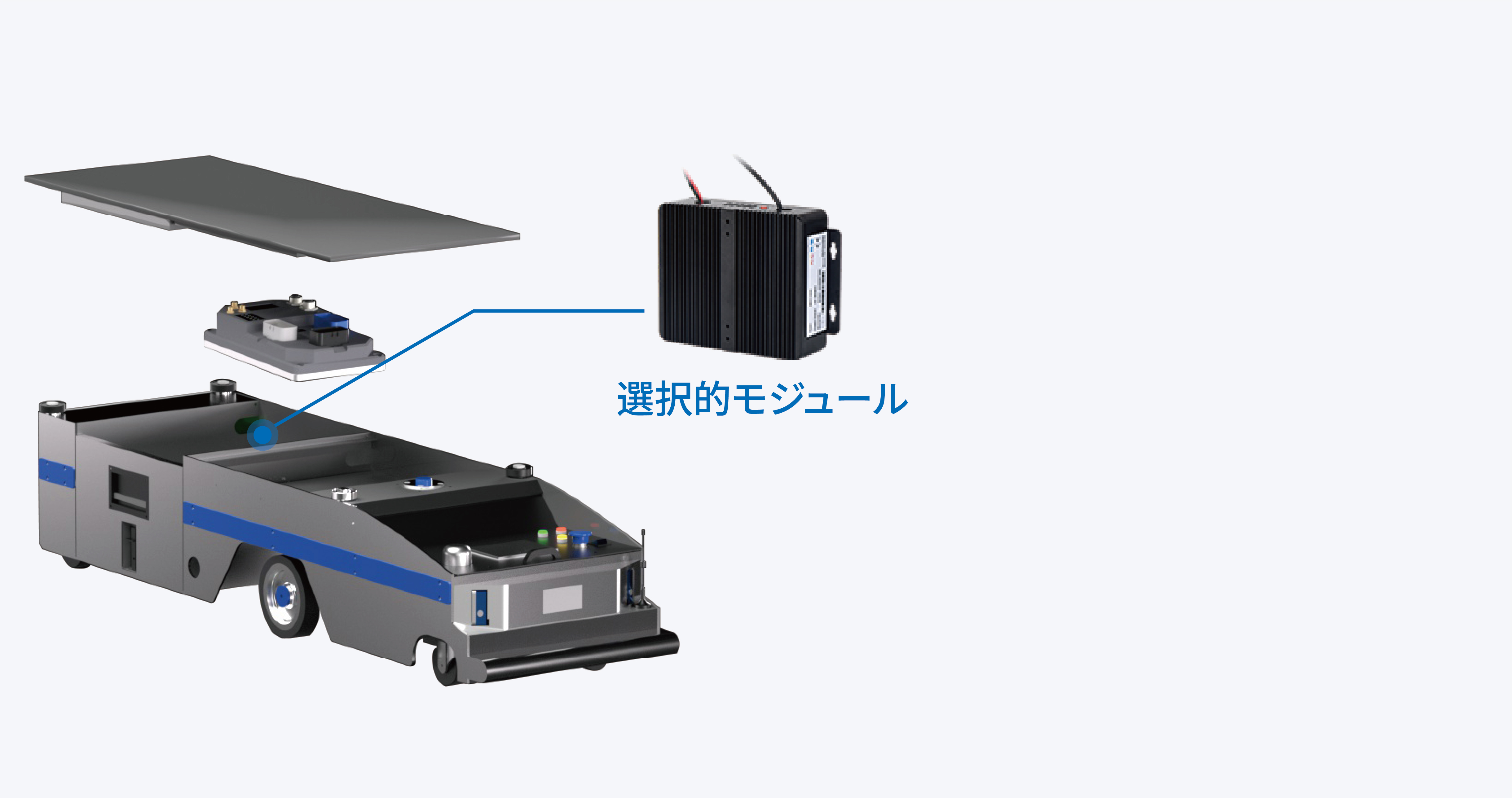
背負い型移動ロボットの全体的なソリューションは、移動ロボットの車両全体の機能に応じて、主に制御システム、ナビゲーションとセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能およびその他のユニットモジュールに分かれています。
背負い型移動ロボットの全体的なソリューションは、移動ロボットの車両全体の機能に応じて、主に制御システム、ナビゲーションとセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能およびその他のユニットモジュールに分かれています。
スキーム構成


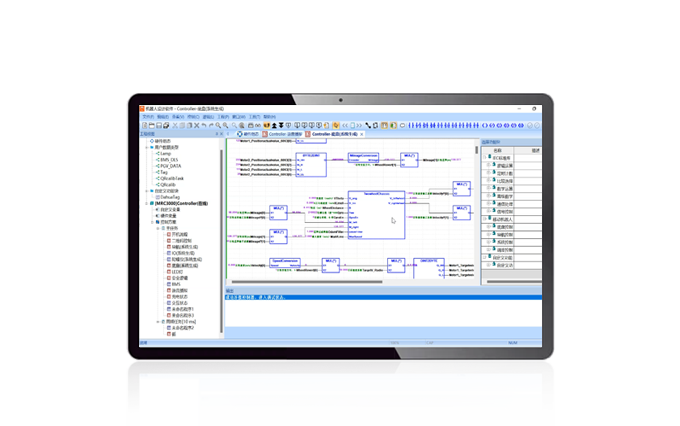
ユニバーサルコントローラ

フォーク型移動ロボット コントローラ


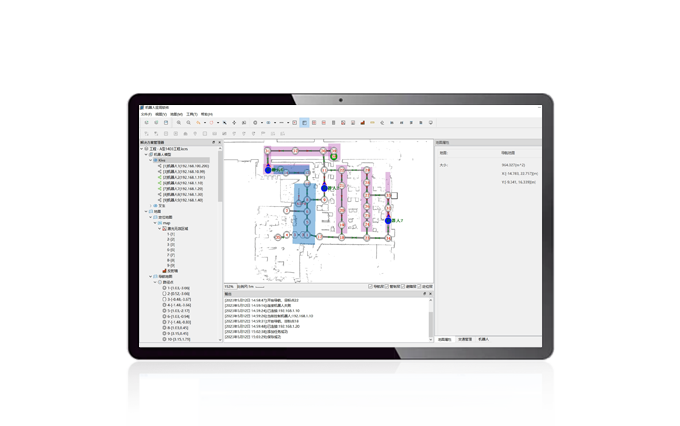
レーザーセンサー
レーザーセンサー
レーザーセンサー
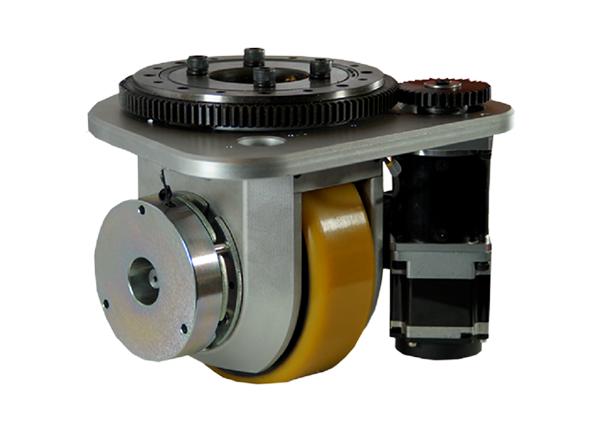
駆動輪

マクナミーホイール

ドライバ

ドライバ

ドライバ

避障激光

避障激光

避障激光

ハンドオペレーター

ポケベルモジュール

車載ディスプレイ

照明

スイッチ
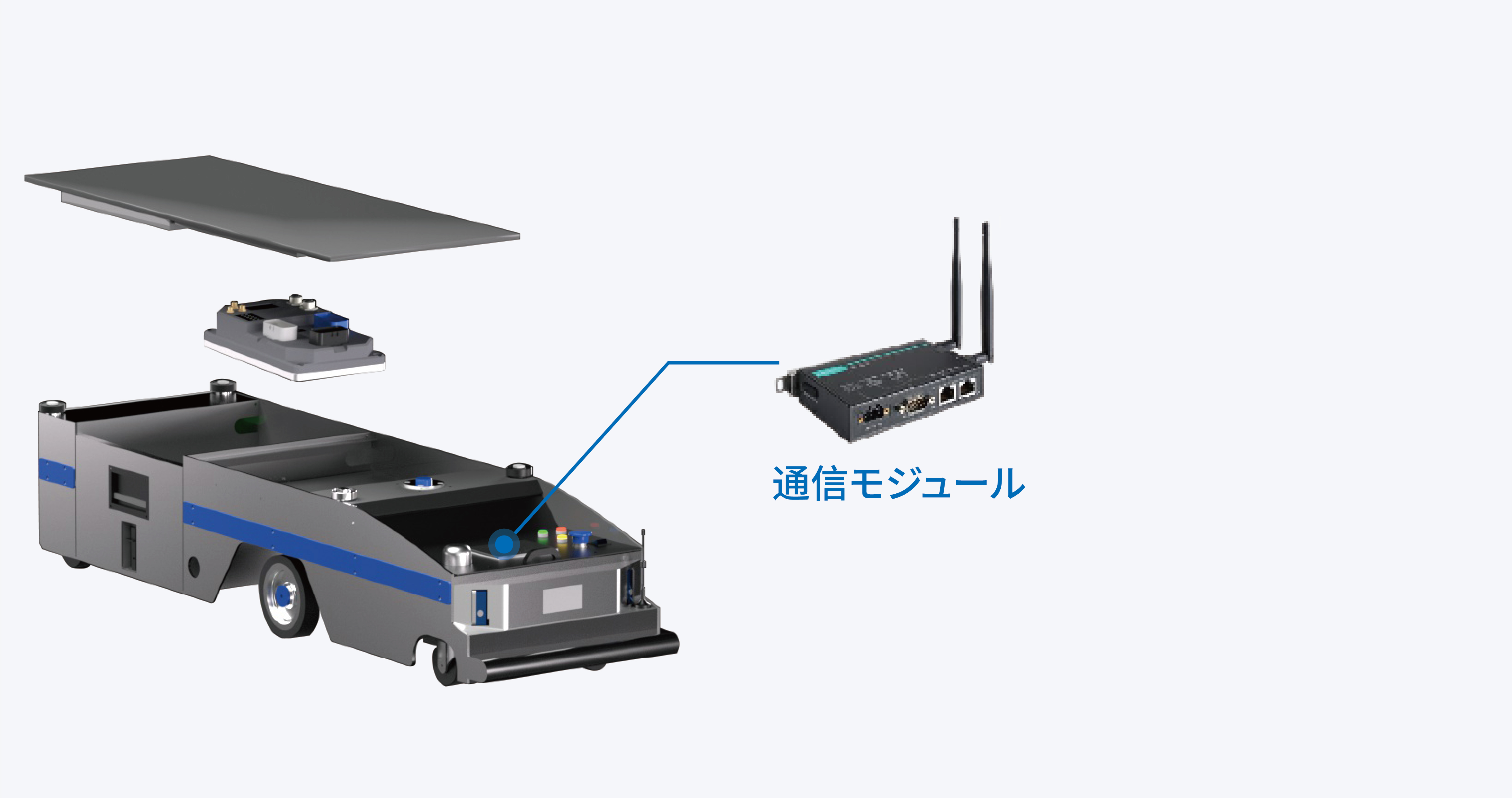

ワイヤレスクライアント
電池

電池
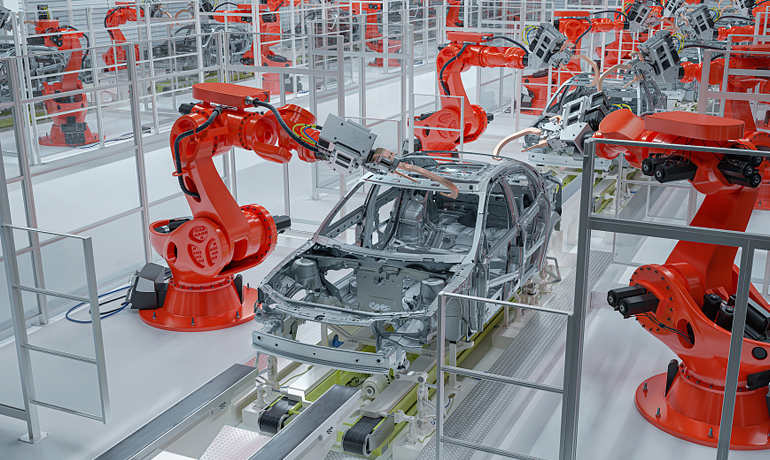
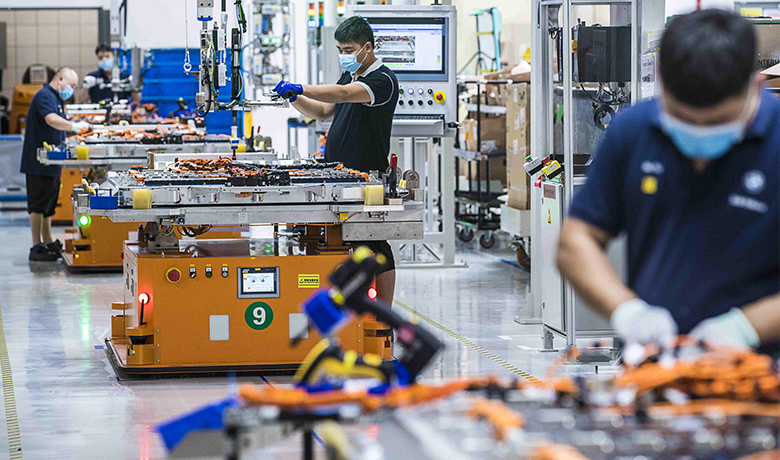
関連事例

背負い型移動ロボット
背負い型移動ロボットはリュックサックを背負って材料や運搬物などの対象物を所定の場所に運搬し、工場や生産ラインでの無人運転を実現する。
背負い型移動ロボットの全体的なソリューションは、主に移動ロボットの車両全体の機能に応じて、制御システム、ナビゲーションとセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能およびその他のユニットモジュールに分かれています。
背負い型移動ロボットの全体的なソリューションは、主に移動ロボットの車両全体の機能に応じて、制御システム、ナビゲーションとセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能およびその他のユニットモジュールに分かれています。

© 2023 Zhejiang Kecong Control Technology Co., Ltd. 公式ウェブサイト | 移動ロボットに人間のサービスを提供しましょう 浙江省公共ネットワークセキュリティ番号 33052302000842 浙ICP备19001570号-1 sitemap.xml