
















































基本パラメータ
型番 | FRV2000 |
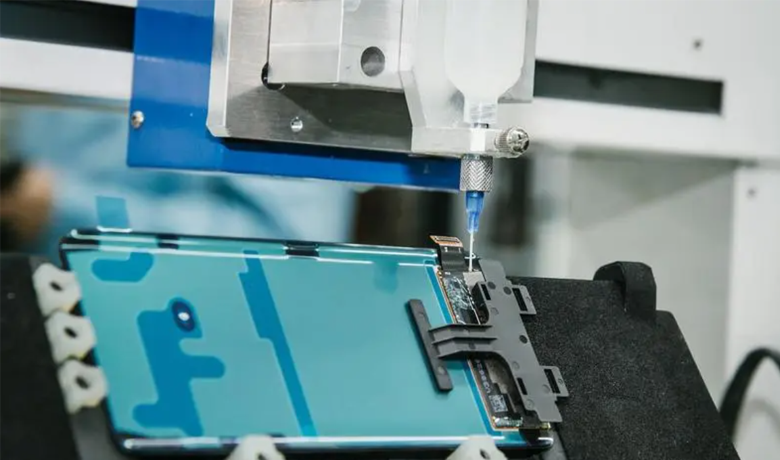
名称 | パレット認識センサー |
対応パレット | 青色の「川」字形プラスチックパレットなど、主流のパレット |
サイズ W xH xD(mm) | 90 x 35 x 50 |
保護等級 | IP67 |
電源供給 | 24 VDC |
動作電流 | 平均電流0.5A、ピーク電流1.5A |
ネットワークポート | ギガビットイーサネット |
TOF解像度 | 640×480@5μm |
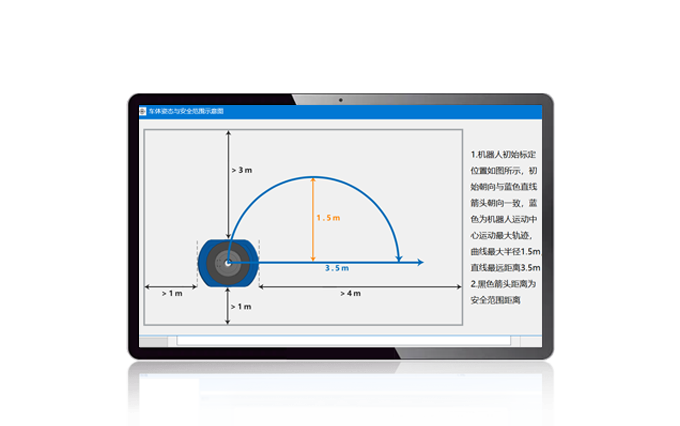
視野角FOV | 73°(H)×55°(V) |
TOF距离 | 5メートル@10%反射 |
検出角度精度 | ±1°(3σ) |
検出位置精度 | ±1cm(3σ) |
通信方式 | イーサネット |
動作温度 | -20℃~60℃ |
保存温度 | -40℃~80℃ |
EMC | EN 55032:2015/A11:2020;ENIEC 61000-3-2:2019/A1:2021;EN 61000-3-3:2013/A1:2019;EN 55035:2017/A11:2020 |
動作湿度 | 85% |
保存湿度 | 85% |
動作大気圧 | 0.1Mpa |
腐食 | 会社の防錆基準に適合 |
取付方法 | M4 |

© 2023 Zhejiang Kecong Control Technology Co., Ltd. 公式ウェブサイト | 移動ロボットに人間のサービスを提供しましょう 浙江省公共ネットワークセキュリティ番号 33052302000842 浙ICP备19001570号-1 sitemap.xml