











































シナリオの概要
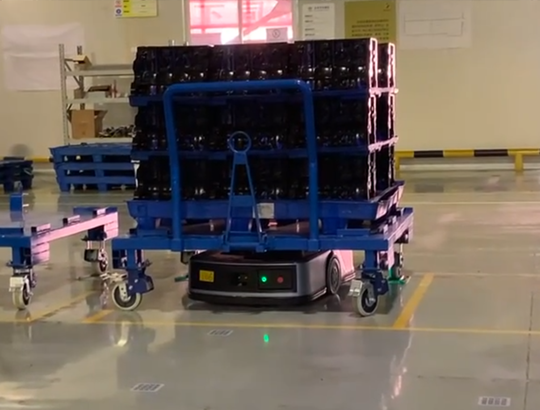
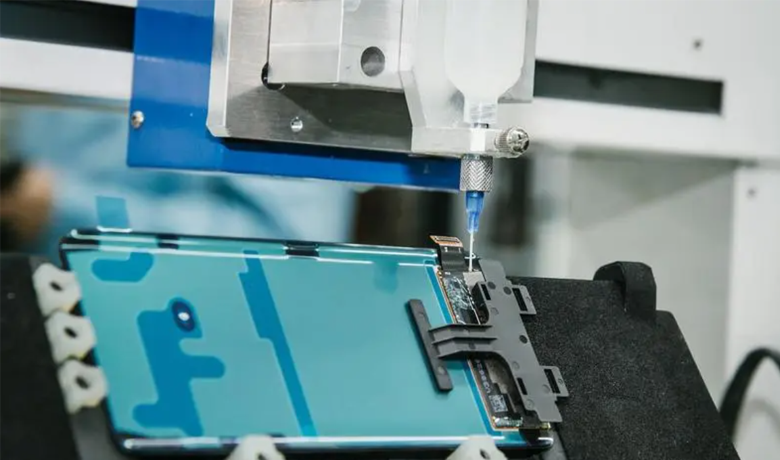
けん引移動ロボットは、テールフックを使用して材料トロリーを牽引し、複数の材料トロリーを同時に牽引して、効率的なハンドリングを実現し、輸送効率を向上させることができます。生産現場での資材台車の移動や作業場への資材台車の搬送などに適しています。
けん引移動ロボットの全体的なソリューションは、主に、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、およびオプションの追加機能などのユニットモジュールに分かれています。 。
けん引移動ロボットの全体的なソリューションは、主に、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、およびオプションの追加機能などのユニットモジュールに分かれています。 。
スキーム構成


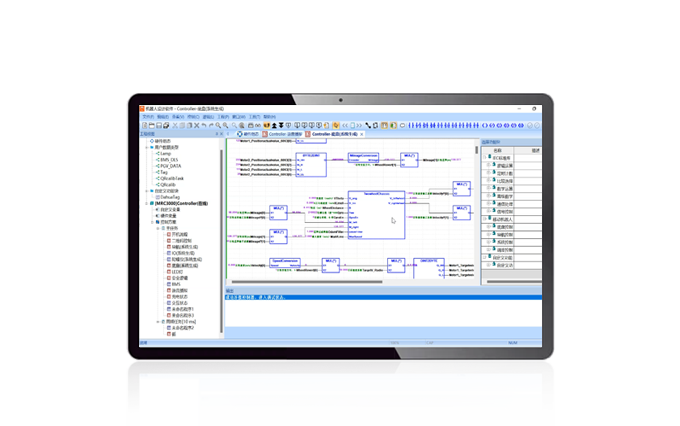
ユニバーサルコントローラ


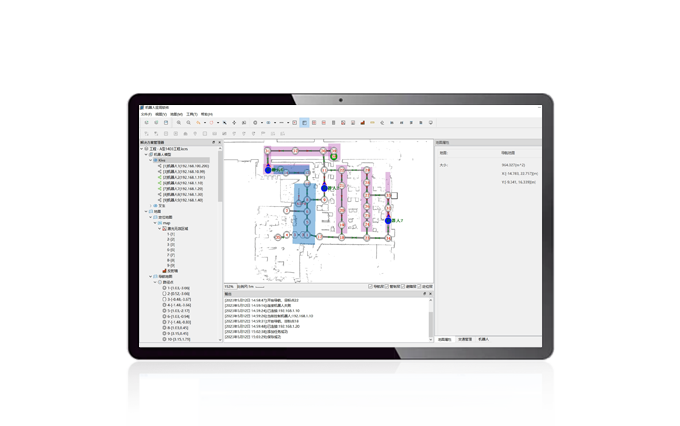
レーザーセンサー

磁気ナビゲーションセンサー

磁気ナビゲーションセンサー

RFIDセンサー


ドライバ

モーター

モーター
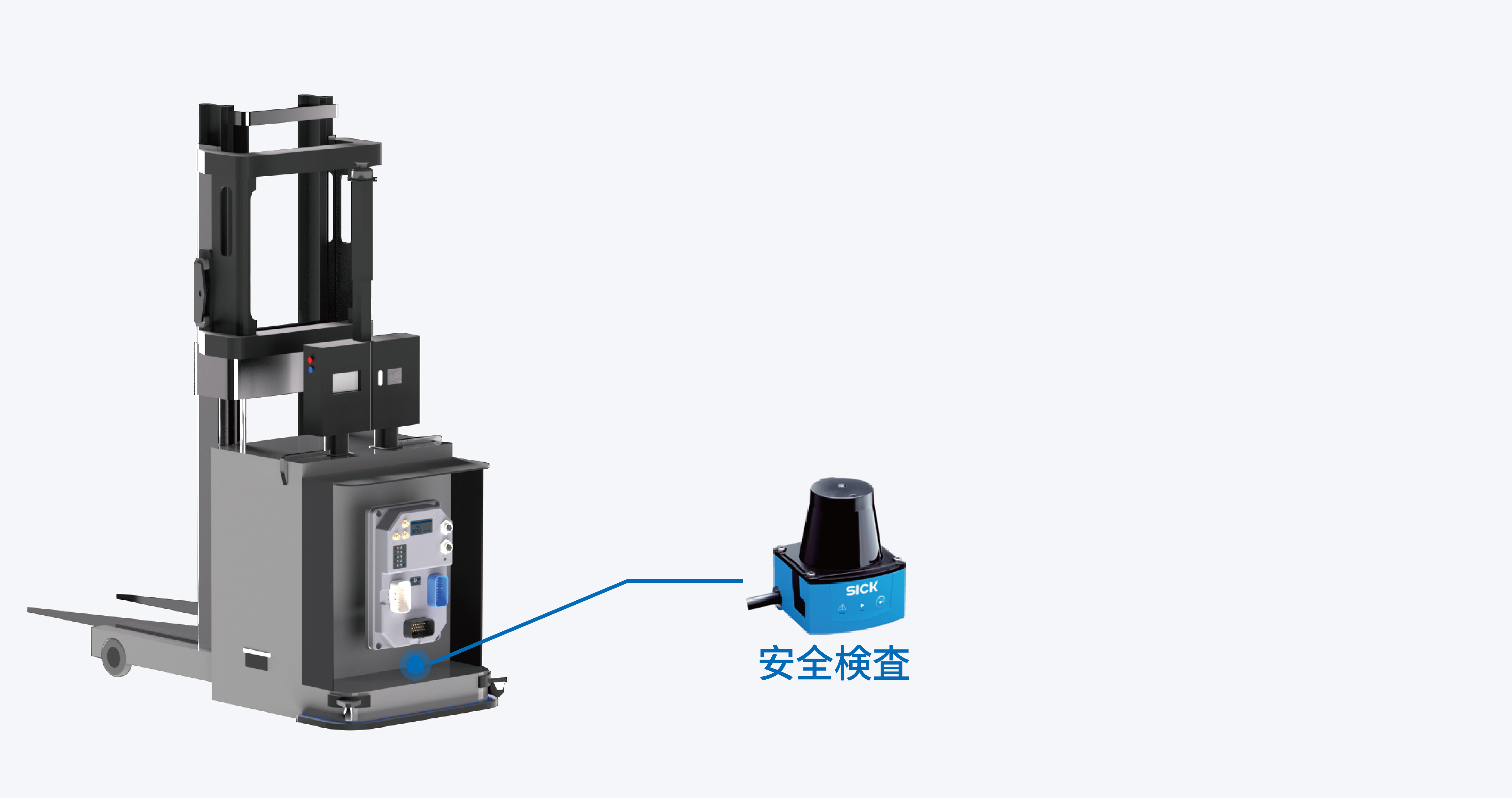

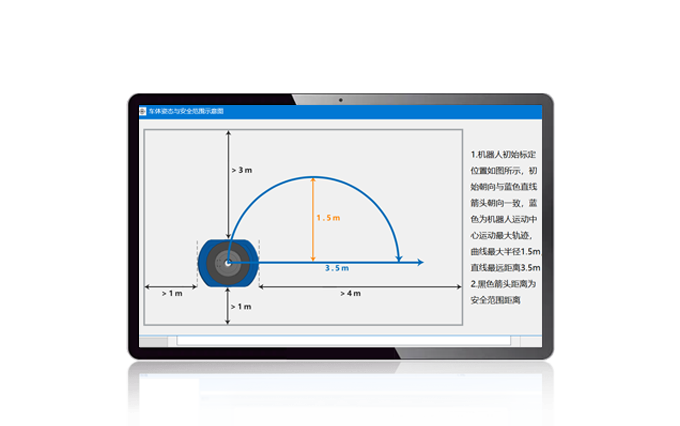
障害物回避用レーザー

障害物回避用レーザー

障害物回避用レーザー


ハンドオペレーター

ポケベルモジュール

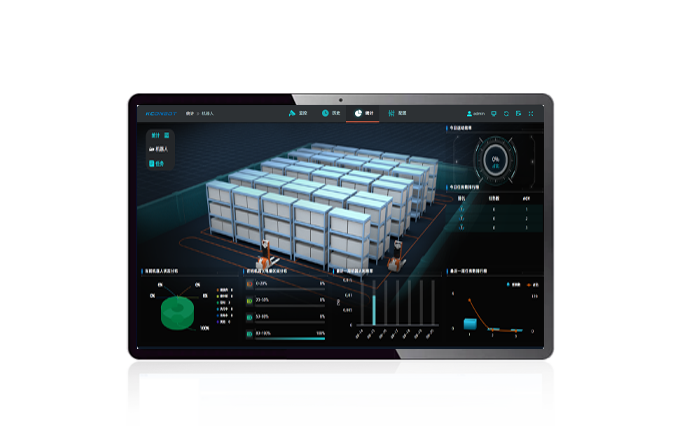
車載ディスプレイ

照明

スイッチ


ワイヤレスクライアント
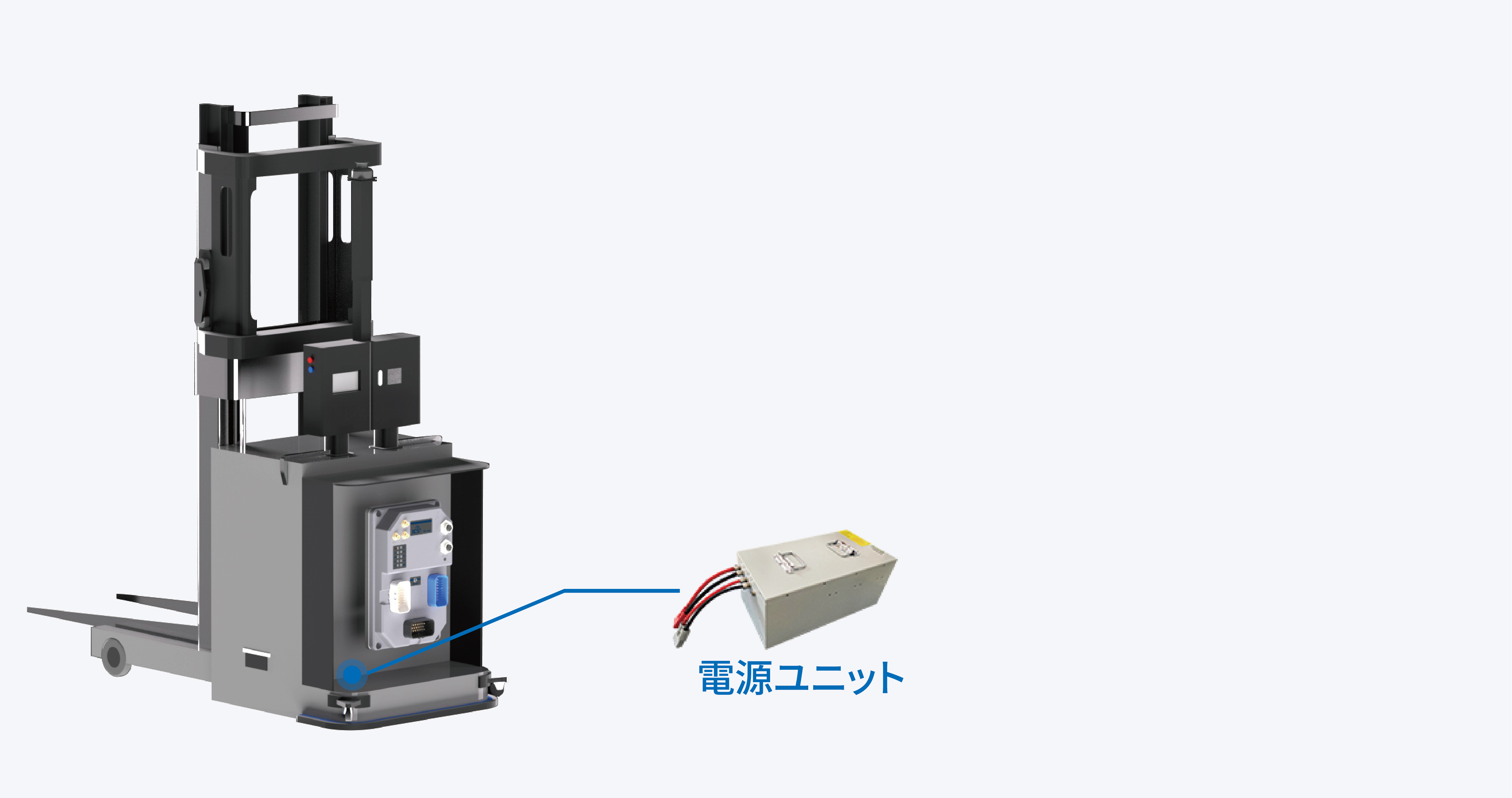
電池

電池


視覚障害物回避モジュール

デュアルレンズカメラ
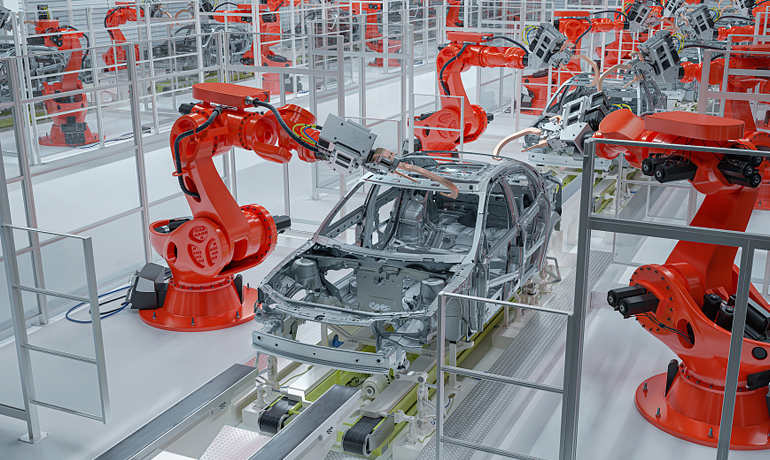
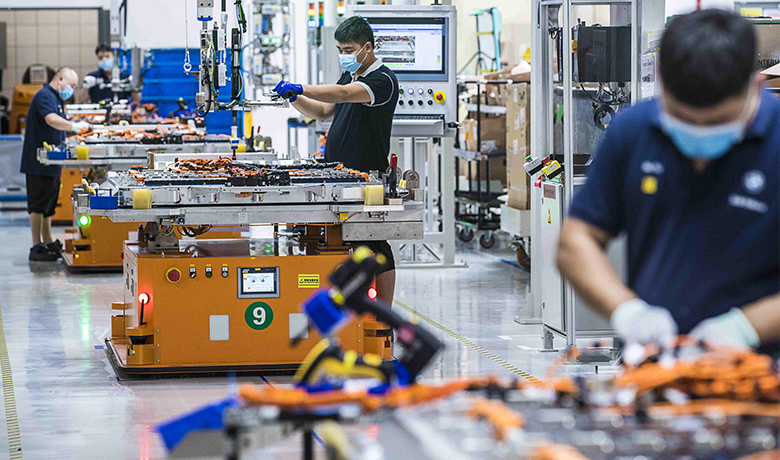
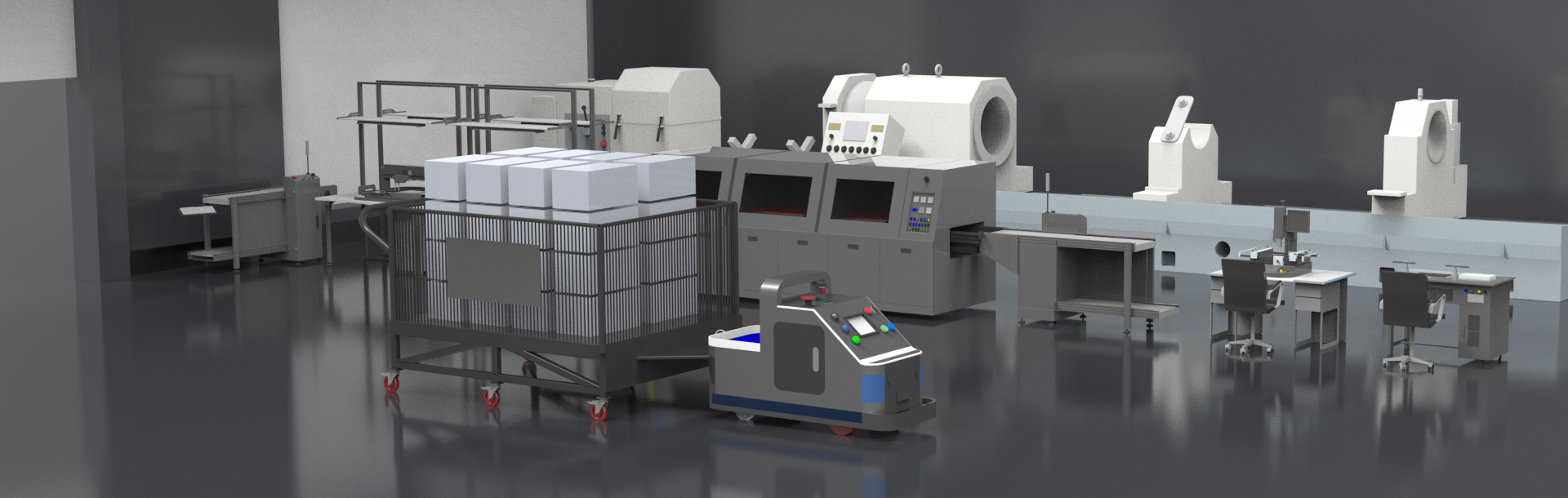
関連事例

けん引型移動ロボット
ナビゲーション:レーザーナビゲーション
シャシーモード:シングルラダーホイール
ナビゲーション精度: ±5mm
シャシーモード:シングルラダーホイール
ナビゲーション精度: ±5mm

© 2023 Zhejiang Kecong Control Technology Co., Ltd. 公式ウェブサイト | 移動ロボットに人間のサービスを提供しましょう 浙江省公共ネットワークセキュリティ番号 33052302000842 浙ICP备19001570号-1 sitemap.xml