









































































型番 | MRC5000-L | MRC5000-U | MRC5000-Q | MRC5000-M |
説明 | ユニバーサルロボットコントローラ(レーザーナビ) | ユニバーサルモバイルロボットコントローラ(多線レーザー) | ユニバーサルロボットコントローラ(QRコードナビ) | ユニバーサルロボットコントローラ(磁気ナビ) |
サイズ W x H x D(mm) | 195.5 x 125.5 x 44.5 | 195.5 x 125.5 x 44.5 | 195.5 x 125.5 x 44.5 | 195.5 x 125.5 x 44.5 |
保護等級 | IP65 | IP65 | IP65 | IP65 |
温度 | -40℃~+80℃ | -40℃~+80℃ | -40℃~+80℃ | -40℃~+80℃ |
湿度 | 10%~90%RH結露しないこと | 10%~90%RH結露しないこと | 10%~90%RH結露しないこと | 10%~90%RH結露しないこと |
EMC | CE認証 | CE認証 | CE認証 | CE認証 |
IMU | √ | √ | √ | √ |
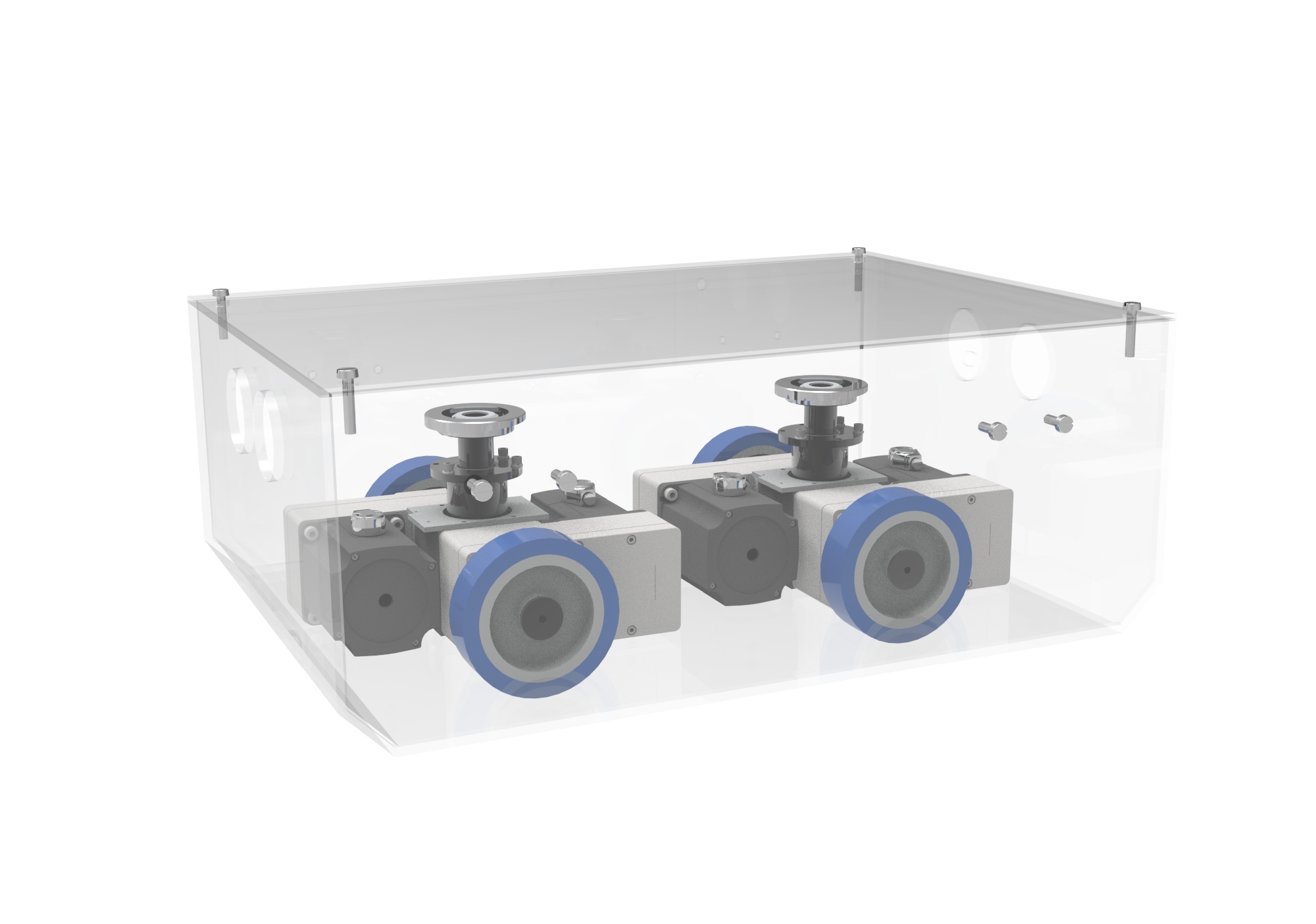
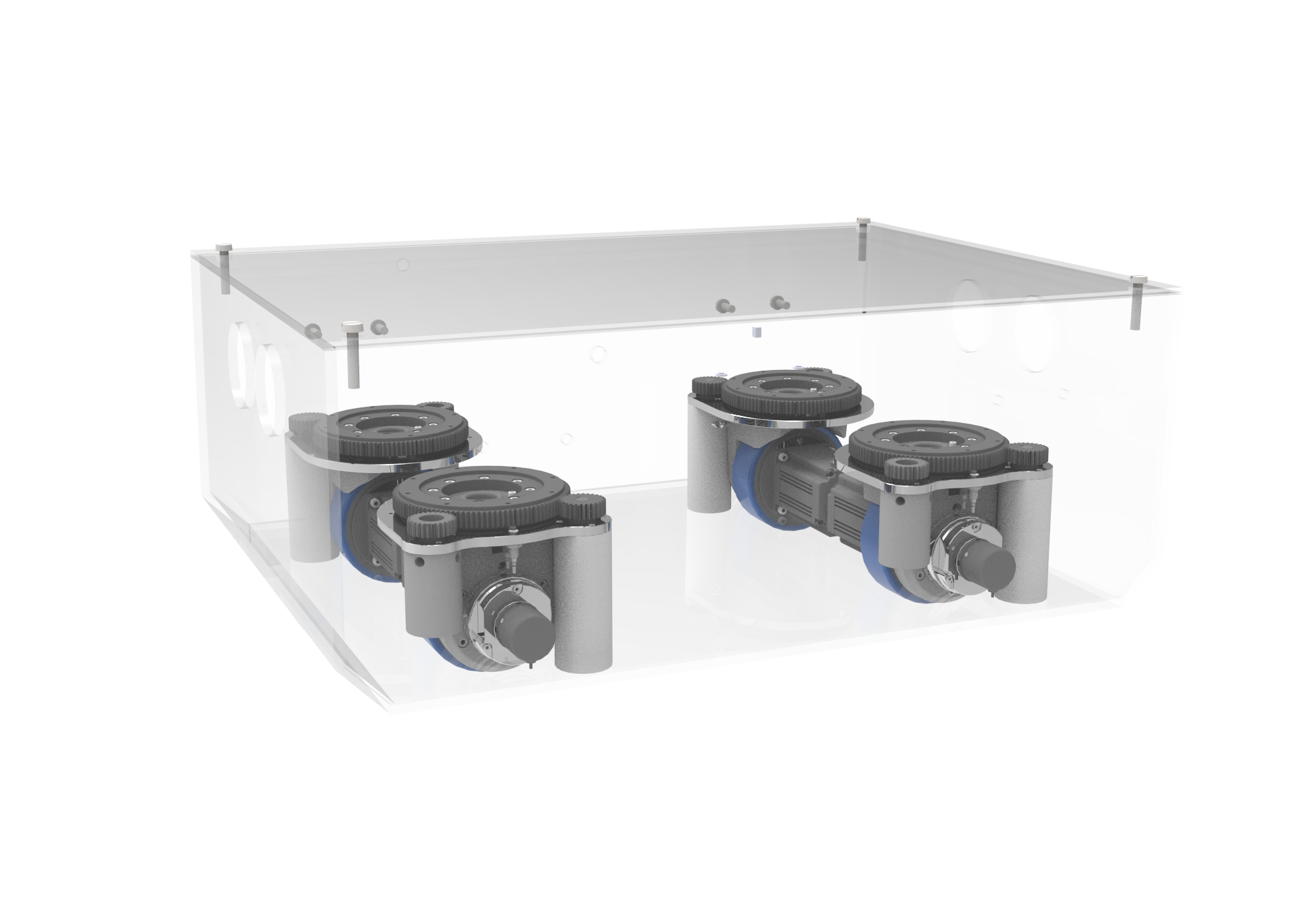
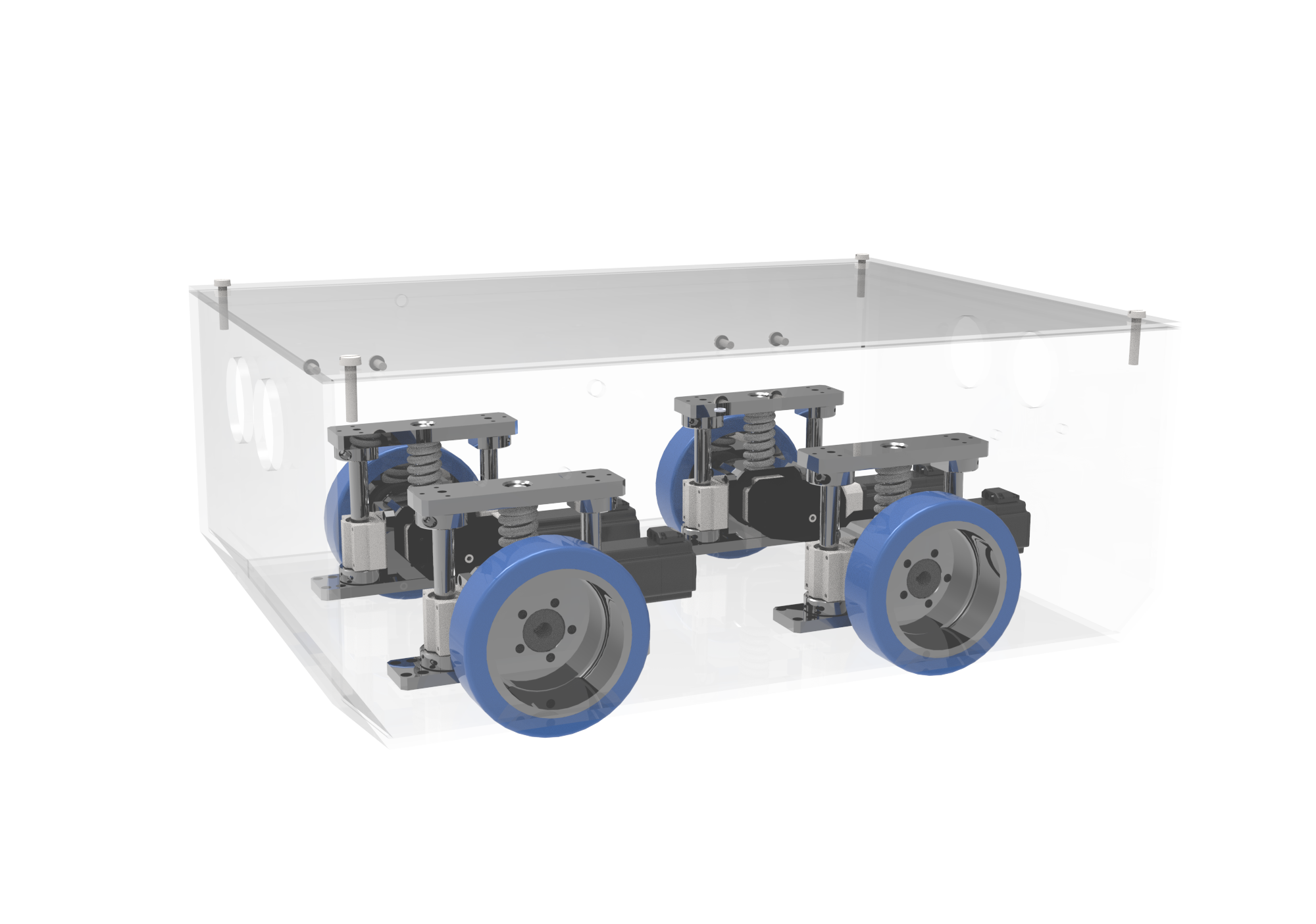
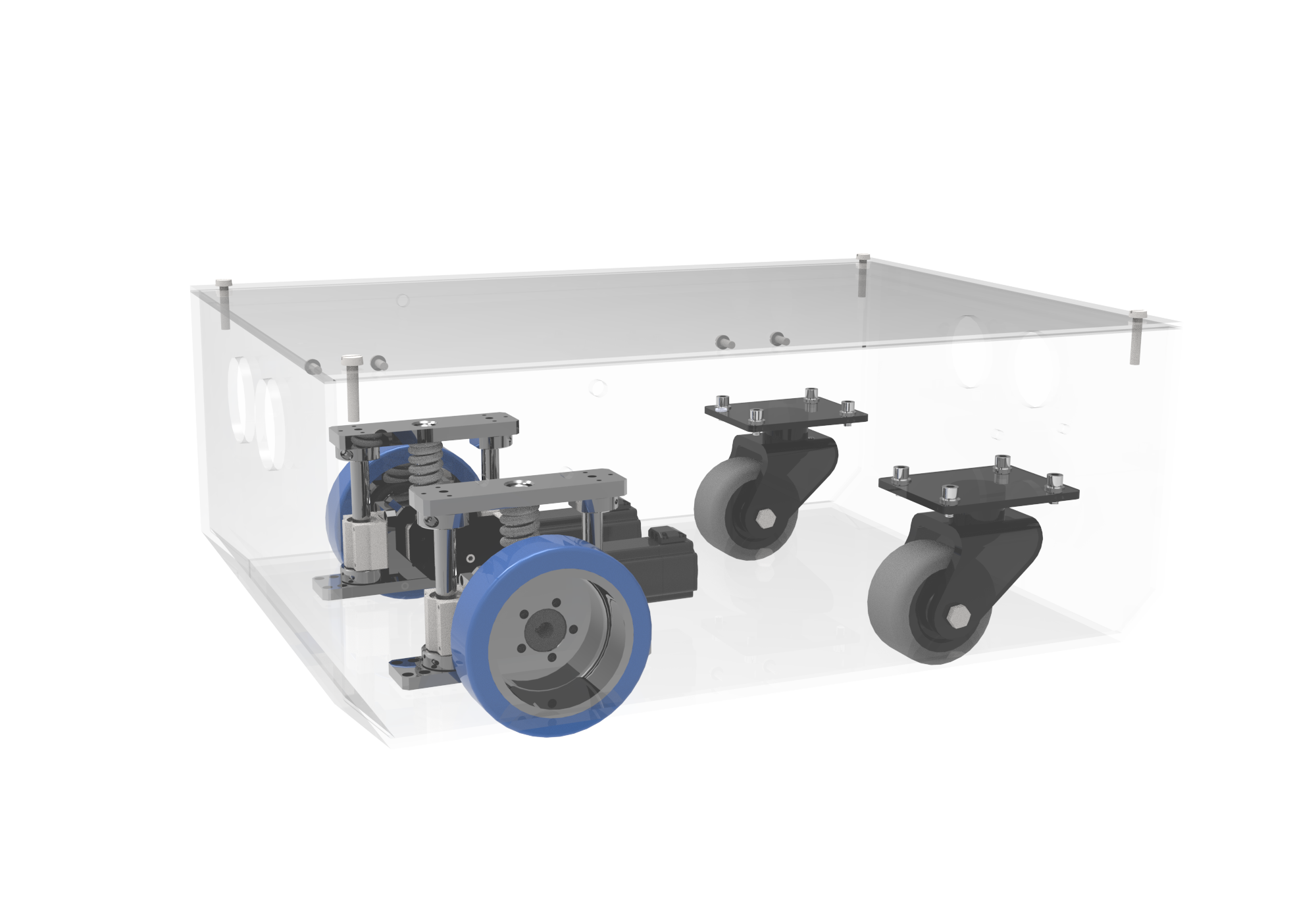
駆動シャーシモデル | 2WD、4WD | 2WD、4WD | 2WD、4WD | 2WD、4WD |
舵輪シャーシモデル | 単舵輪、双舵輪、四舵輪 | 単舵輪、双舵輪、四舵輪 | 単舵輪、双舵輪、四舵輪 | 単舵輪、双舵輪、四舵輪 |
その他シャーシモデル | ディファレンシャル・アッセンブリー、マクナミー・ホイール、カスタマイズされたシャシー | ディファレンシャル・アッセンブリー、マクナミー・ホイール、カスタマイズされたシャシー | ディファレンシャル・アッセンブリー、マクナミー・ホイール、カスタマイズされたシャシー | ディファレンシャル・アッセンブリー、マクナミー・ホイール、カスタマイズされたシャシー |
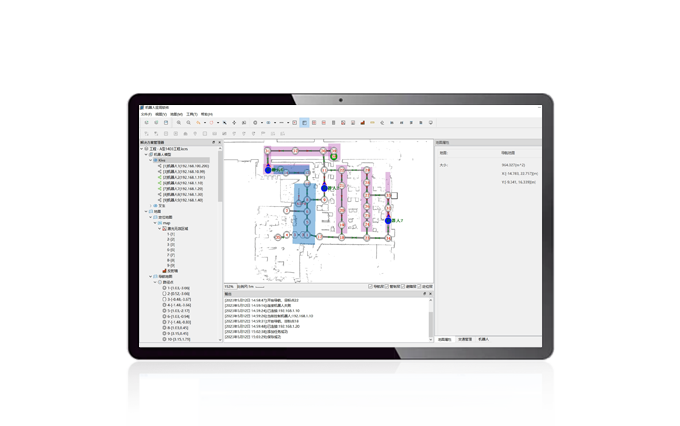
レーザーナビゲーション | √ | 3Dレーザーナビゲーション | × | × |
QRコードナビゲーション | √ | √ | √ | × |
磁気ナビゲーション | √ | √ | × | √ |
その他のナビゲーション方法 | GNSSおよびその他のナビゲーション | GNSSおよびその他のナビゲーション | × | × |
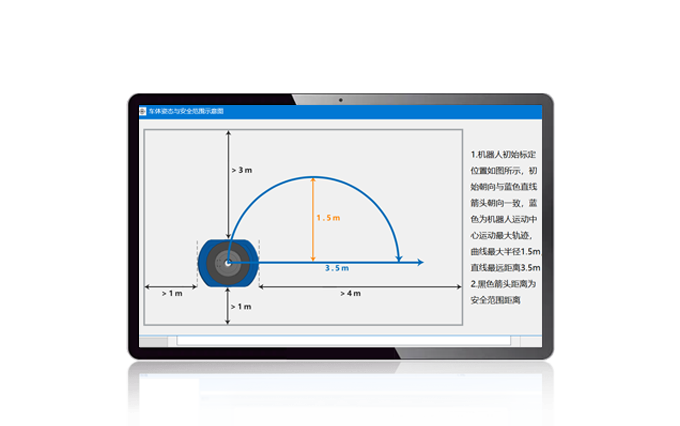
ナビゲーション位置決め精度 | ±5mm | ±10mm | ±10mm | ±10mm |
角度制御精度 | ±0.5° | ±0.5° | ±0.5° | ±0.5° |
地図エリア | ≤400000 m2 | ≤400000 m2 | - | - |
CAN(チャンネル) | 2 | 2 | 2 | 2 |
RS485/RS232/RS422(チャンネル) | 1/1/1 | 1/1/1 | 1/1/1 | 1/1/1 |
AI/AO | 2/2 | 2/2 | 2/2 | 2/2 |
DI/DO/DIO | 16/16/× | 16/16/× | 16/16/× | 16/16/× |
エンコーダー(チャンネル) | 2 | 2 | 2 | 2 |
有線産業用イーサネット | 2 | 2 | 2 | 2 |
無線デバッグインターフェース | √ | √ | √ | √ |
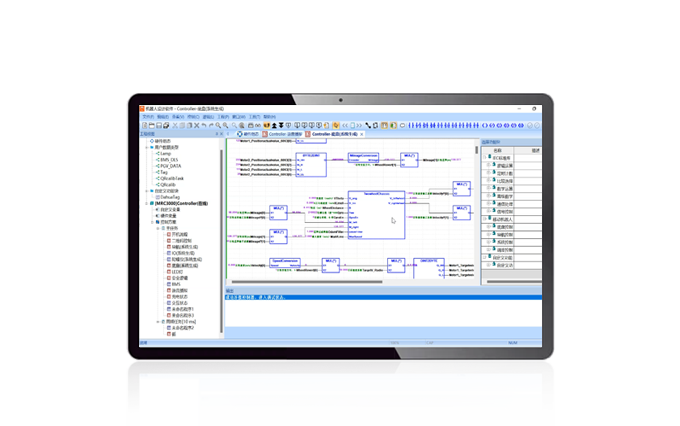
ロボット設計ソフトウェア | √ | √ | √ | √ |
ロボットアプリケーションソフトウェア | √ | √ | √ | √ |
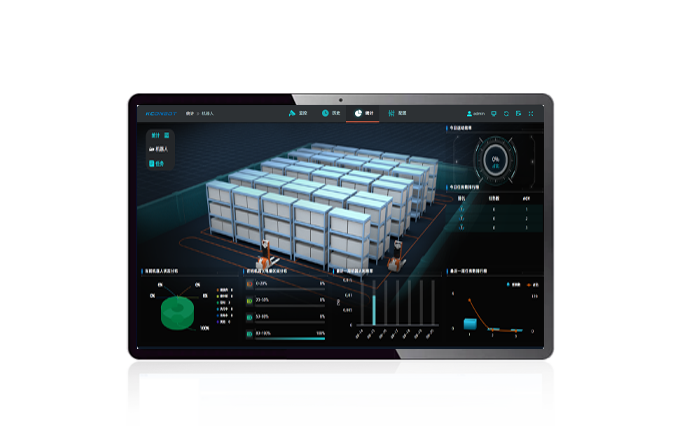
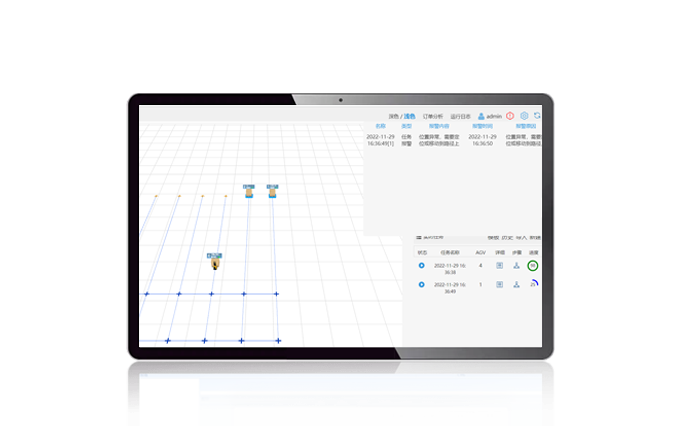
ロボット監視およびスケジューリングソフトウェア | オプション | オプション | オプション | オプション |
拡張機能 | パレット認識、視覚位置決め、材料足認識、リフト同期追従機能、マーカの二次位置決め、ナビゲーションレーザー補助障害物回避、3D視覚による障害物回避 | パレット認識、視覚位置決め、材料足認識、リフト同期追従機能、マーカの二次位置決め、ナビゲーションレーザー補助障害物回避、3D視覚による障害物回避 | マーカの二次位置決め、3D視覚による障害物回避 | マーカの二次位置決め、3D視覚による障害物回避 |


フォークリフト移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、オプションの9つのカテゴリに主に分類されます。機能、ユニットモジュール構成が大きい。

潜在的なリフティングとハンドリングの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーション センサー、シャーシ ドライブ、アクチュエーター、安全検出、インタラクティブ モジュール、通信モジュール、電源ユニット、オプションの 9 つのカテゴリに主に分類されます。機能、ユニットモジュール構成が大きい。

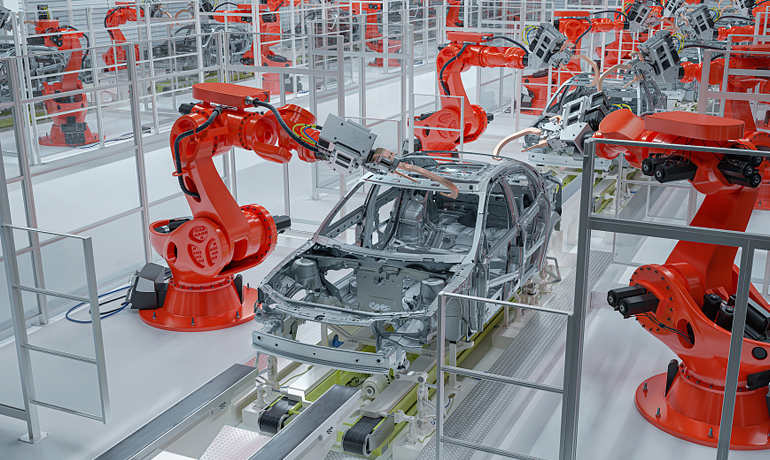
協調型(複合型)移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、主に制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能に分けられます。 9つの主要なユニットモジュールで構成されています。

コンベア型移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、主に制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、オプション機能に分かれます。大規模なユニットモジュール構成。。

ボックス型移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、豊富なユニットモジュール構成とオプション機能を搭載。

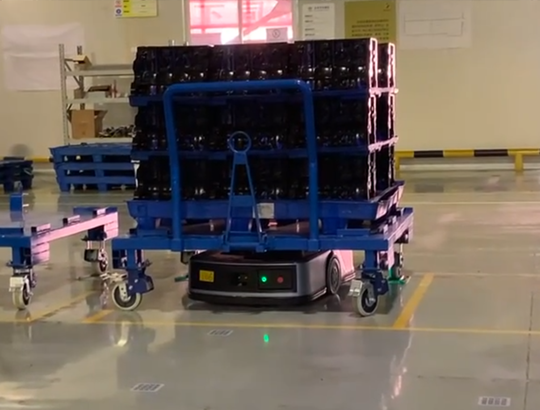
けん引移動ロボットの全体的なソリューションは、主に、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、およびオプションの追加機能などのユニットモジュールに分かれています。 。

大型移動ロボットの全体的なソリューションは、主に、車両の機能に応じて、制御システム、ナビゲーションセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、およびオプションの追加機能などのユニットモジュールに分かれています。移動ロボット。

背負い型移動ロボットの全体的なソリューションは、移動ロボットの車両全体の機能に応じて、主に制御システム、ナビゲーションとセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能およびその他のユニットモジュールに分かれています。

駐車移動ロボットの全体的なソリューションは、主に移動ロボットの車両全体の機能に応じて、制御システム、ナビゲーションと感知、シャーシ駆動、安全検出、相互作用モジュール、通信モジュール、電源ユニット、およびオプション機能から構成されるユニットモジュールに分かれています。

屋外移動ロボットの全体的なソリューションは、主に移動ロボットの車両全体の機能に応じて、制御システム、ナビゲーションと検出、シャーシ駆動、安全検出、相互作用モジュール、通信モジュール、電源ユニット、オプション機能およびその他のユニットとモジュールに分かれています。
